
04/04/2022
Door Ad Spijkers
Onderzoekers aan de EPFL hebben een siliconen framboos ontwikkeld die oogstrobots kan leren fruit te plukken zonder te veel druk uit te oefenen.
Frambozen hebben een opvallende scharlakenrode kleur en een kenmerkende structuur. Ze bestaan uit tientallen vlezige vruchtjes met een zoete maar lichtzure pulp. Maar deze delicate structuur is ook hun belangrijkste zwakte, omdat het hen kwetsbaar maakt voor de geringste kras of blauwe plek. Telers weten dat frambozen moeilijk te oogsten zijn. Wetenschappers van de École Polytechnique Fédérale de Lausanne (EPFL) onderzochten of robots met geavanceerde actuatoren en sensoren een helpende hand zouden kunnen bieden.
Trainingstool
Door hoge arbeidskosten en personeelstekorten verliezen boeren elk jaar miljoenen aan producten. Dit probleem is nog nijpender bij delicate gewassen zoals frambozen. Maar voorlopig is er geen levensvatbaar alternatief voor het met de hand oogsten van het fruit. Het oogstseizoen voor frambozen is kort en het fruit is zo waardevol, dat verspillen geen optie is. De kosten en logistieke uitdagingen van het testen van verschillende opties in het veld zijn groot. Daarom voerden de onderzoekers hun tests in het laboratorium uit en ontwikkelden ze een replica framboos voor het trainen van oogstrobots.
Voor het plukken van een framboos moet je de vrucht van onderaf ondersteunen en hem voorzichtig tussen duim en wijsvinger vastpakken. Dan moet je hem voorzichtig trekken totdat hij loskomt van de houder – het deel van de vrucht dat aan de plant blijft zitten – en in de palm van je hand valt. Om de oogstrobots te laten wennen aan deze taak, hebben de -ingenieurs een siliconen framboos ontworpen en gebouwd.
De robot kan meten hoeveel druk er wordt uitgeoefend, zowel terwijl het fruit nog aan de bak zit als nadat het is losgelaten. De eigenschappen van de siliconen framboos kunnen worden aangepast om de weerstand van het fruit te simuleren. Dankzij deze feedback kunnen robots getraind worden om het fruit te oogsten zonder het te beschadigen.
De gesensoriseerde framboos, gekoppeld aan een machine learning-programma, kan een robot leren precies de juiste hoeveelheid kracht uit te oefenen. Het moeilijkste is om de robot te trainen om zijn grip los te maken zodra de framboos loskomt van de bak, zodat het fruit niet wordt geplet. Dat is moeilijk te bereiken met conventionele robots.
Replica framboos
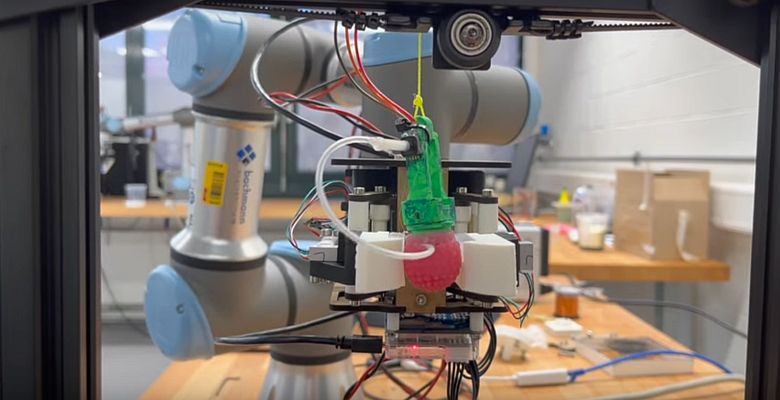
Onder zijn onnatuurlijk uniforme vorm en licht doorschijnend roze oppervlak, is de replica framboos een mooi staaltje techniek. Het 'vlees' is gemaakt van siliconen, de houder van 3D-geprint kunststof. De replica bevat ook een vloeistofsensor om de compressiekracht te meten die door de robot wordt uitgeoefend. De trekkracht die het fruit en de bak bij elkaar houdt, wordt gegenereerd door twee magneten.
Voorlopig is de oogstrobot van het lab niet meer dan een grijper met twee 3D-geprinte vingers, bedekt met een dunne laag siliconen en bevestigd aan een robotarm. Wel moesten de ingenieurs meer dan een dozijn frambozen opofferen om hun grijper in het laboratorium te kalibreren. Vervolgens voerden ze een reeks tests uit, waarbij ze eerst de replicaframboos met de hand plukten en vervolgens het robotsysteem gebruikten.
Proof of concept
Hoewel de wetenschappers het proof-of-concept voor hun ontwerp hebben aangetoond, is de technologie zelf nog verre van volwassen. Tot nu toe hebben ze een eenvoudig feedbacksysteem in onze robot gebruikt. De volgende stap is het ontwerpen en bouwen van complexere controllers, zodat robots op grotere schaal frambozen kunnen plukken zonder ze te pletten. Ook ontwikkelen ze een camerasysteem waarmee robots niet alleen frambozen kunnen 'voelen' maar ook 'zien' waar ze zich bevinden en of ze klaar zijn om te worden geoogst.
De ontwikkelaars willen hun oogstrobot deze zomer op het veld testen, op het hoogtepunt van het lokale frambozenseizoen. Zo'n systeem zou bijvoorbeeld ook gebruikt kunnen worden om andere bessen te plukken. Ze willen ook technologie ontwikkelen voor ander zacht fruit en dit Physical Twin-concept toepassen op meer gecompliceerde taken zoals andere bessen, tomaten, abrikozen of druiven.
Foto: screenshot video EPFL