
20/06/2022
Door Ad Spijkers
As robots increasingly collaborate with people on the factory floor, in warehouses and elsewhere at work, the decision of who will perform which tasks becomes more complex and important.
Humans are better suited for some tasks, robots for others. And in some cases, it is beneficial to spend time teaching a robot to perform a task now and reap the rewards later. Researchers at the Robotics Institute (RI) at Carnegie Mellon University in Pittsburgh have developed an algorithmic planner that helps delegate tasks to humans and robots.
Using algorithms and software to decide how to delegate and distribute labor is not new, even when robots are part of a team. However, this work is one of the first methods to incorporate robotics into its reasoning.
Considerations
The scheduler, called ADL (Act, Delegate or Learn) considers a list of tasks and decides how best to assign them. The researchers asked three questions:
- when should a robot complete a task?
- when should a task be delegated to a human?
- when should a robot learn a new task?
There are costs associated with decisions, such as the time it takes a human to complete a task, the time it takes to teach a robot to complete a task, and the cost of a robot failing a task. Given these costs, ADL provides the optimal division of work.
The work of the team can be useful in production and assembly shops, for sorting packages, in fact in any environment where people and robots work together to perform different tasks.
Algorithm
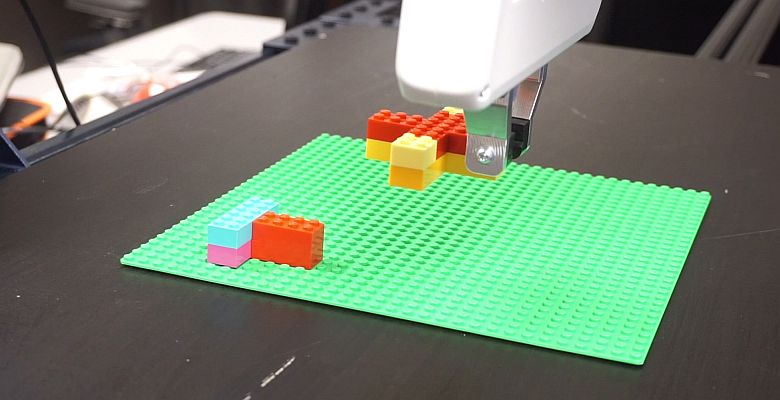
The researchers tested the planner in scenarios where humans and robots had to place blocks on a pegboard and stack parts of different shapes and sizes of Lego bricks.
Often during production a person manually manipulates a robot arm to teach the robot how to complete a task. Teaching a robot takes time and comes with an initial cost. But in the long run, it can be helpful if the robot can learn a new skill. Part of the complexity is deciding when it is best to teach a robot a task or delegate the task to a human. This requires the robot to predict what other tasks it can complete after learning a new task.
Based on this information, the planner converts the problem into a 'mixed integer' program. This is an optimization program often used in planning, production planning or designing communication networks. These tasks can be solved efficiently with out-of-the-box software. The new scheduler outperformed traditional models in all cases and reduced the cost of completing tasks by 10% to 15%.
Source: Carnegie Mellon University