
14/10/2024
Door Ad Spijkers
De oude kunst van het vouwen van papier neemt een futuristische wending met onderzoek aan de University of Pennsylvania in Philadelphia.
Wetenschappers aan de universiteit onderzoeken de nauwkeurigheid van techniek met de creativiteit van kunst om door origami geïnspireerde robots te ontwikkelen. Deze robots, gebouwd van dunne, opvouwbare materialen, bieden een fascinerende blik op de toekomst van robotica.
Origami
Door origami geïnspireerde fabricage- en vouwbenaderingen kunnen robots creëren die hun vorm kunnen transformeren. De CurveQuad-robot die onlangs aan de universiteit is ontwikkeld bijvoorbeeld is een door origami geïnspireerde robot die kan vouwen, uitvouwen, kruipen en sturen met behulp van één motor. Het ontwerp is gebaseerd op gebogen-vouworigami, wat de robot ondanks zijn eenvoud een opmerkelijke wendbaarheid geeft — hij heeft slechts vier vouwen. Deze robots kunnen elektronica, voortstuwing en detectie direct in hun platte lichaam integreren. Zulke robots kunnen in zwermen worden ingezet voor verkennings- of inspectietaken, wat de schaalbaarheid en kosteneffectiviteit van deze technologie laat zien.
Een recente resultaat van het onderzoek is het principe dat elke kinematische keten kan worden geconstrueerd met behulp van origamitechnieken. Kinematische keten is een term die wordt gebruikt om te verwijzen naar een reeks schakels en gewrichten die de armen en benen van een robot vormen. Omdat fabricage van origami relatief snel en toegankelijk is, betekent dit dat in de toekomst volledige robots binnen enkele dagen of zelfs uren kunnen worden ontworpen en gemaakt, Dit biedt nieuwe mogelijkheden voor het creëren van lichtgewicht, flexibele en veilige robots, ideaal voor interactie met mensen.
De origamipatronen worden automatisch gegenereerd, dus een persoon hoeft geen origamikunstenaar of ingenieur te zijn. Een gebruiker hoeft alleen de verschillende gewrichten van de robot die hij of zij wil te kunnen beschrijven, en er komt een ontwerp uit. De potentiële toepassingen zijn groot: van educatieve hulpmiddelen die complexe roboticaconcepten toegankelijk maken voor studenten tot dynamische robots voor het verkennen van ongestructureerde omgevingen.
Integratie
Met steun van de National Science Foundation (NSF)in Washington DC breidt het onderzoeksteam hun werk uit om actuatoren, sensoren en besturing te integreren. De ontwikkelaars bouwen ook intuïtieve ontwerptools om het ontwerpproces gemakkelijker te maken voor niet-robotici. Door op robotonderdelen te klikken en ze op een computerscherm te slepen, kunnen ontwerpers op creatieve wijze verschillende kinematische ketens verkennen. Ze kunnen deze direct omzetten in een origamipatroon dat ze in het echt kunnen testen.
Met behulp van deze software werkt het team samen met The Arts League om robots, activiteiten en workshops te creëren voor studenten, kunstenaars en de algemene gemeenschap om meer te leren over robotica.
Toepassingen
Origami robots zijn niet alleen beperkt tot binnenomgevingen en activiteiten in de klas. Een ander project betreft onderwaterrobots met door origami geïnspireerde ontwerpen. De robots kunnen van lichaamsvorm veranderen om water op te nemen en uit te stoten, waardoor een straal ontstaat om zichzelf voort te stuwen, net zoals inktvissen dat doen. Deze robots bieden ongekende mogelijkheden omdat ze betaalbaar, gemakkelijk te maken en stevig zijn en geschikt om efficiënt onder water te bewegen.
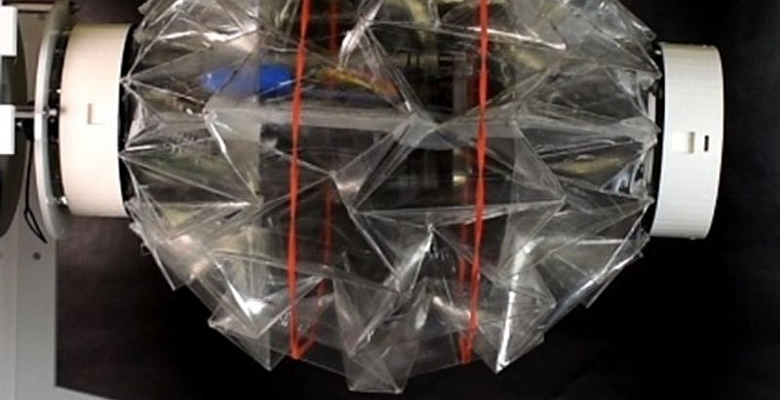
De onderzoekers gebruikten het magische bal-origamipatroon, dat kan veranderen tussen een ellipsoïde (laag volume) en een bolvormige (hoog volume) vorm. Een speciaal mechanisme helpt de robot samen te trekken om water op te nemen. De natuurlijke mechanica van de magische bal helpt hem terug te keren naar zijn oorspronkelijke vorm, waardoor een voortstuwingssysteem ontstaat waarmee ze efficiënt kunnen zwemmen. De mogelijke toepassingen omvatten bewaking van de omgeving en onderwaterverkenning.
Straalaandrijving
Door origami geïnspireerde robots brengen vooruitgang, van zichzelf vouwende en ontvouwende robots tot robots die kunnen oplossen of van vorm kunnen veranderen. Het onderzoek bevordert robotica en inspireert nieuw denken over materialen en ontwerp. De innovaties openen een breed scala aan toepassingen, zoals het verkennen van onvoorspelbare terreinen in de ruimte, waar de flexibiliteit en aanpasbaarheid van origami-robots cruciaal kunnen zijn. De reis van eenvoudige papiervouwen naar complexe robotsystemen illustreert de kracht van fundamenteel onderzoek.
Foto: Zhiyuan Yang and Dongsheng Chen, Sung Robotics Lab