
26/11/2021
Door Ad Spijkers
Amerikaans wetenschappers ontwikkelen een nieuw type onderwaterrobot om ecosystemen van koraalriffen te bestuderen.
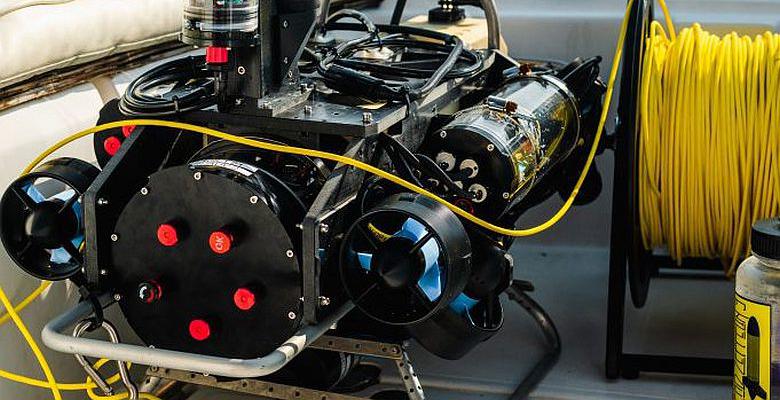
Het Woods Hole Oceanographic Institution (WHOI) in Woods Hole (aan de zuidkust van Massachusetts) ontwikkelt een prototype van een nieuw autonoom onderwatervaartuig. Het kan door complexe onderwateromgevingen navigeren en gedurende lange tijd adaptief data verzamelen.
Het doel van de onderzoekers van WHOI en Syracuse University (New York State) is, nieuwe wegen te openen voor de studie naar koraalriffen. De robots moeten gedurende langere tijd de biomassa, biodiversiteit en het gedrag van organismen in of door een rif meten.
Koraalrifffen
Koraalriffen ondersteunen de gezondheid van de oceaan en grote aantallen mensen wereldwijd. Ze nemen echter over de hele wereld af als gevolg van stijgende temperaturen, verzuring van de oceaan, vervuiling en andere bedreigingen. Wetenschappers bestuderen de complexe ecosystemen van riffen om ze beter te begrijpen en manieren te bedenken om met een groeiende crisis om te gaan.
De tools die onderzoekers nu hebben om koraalriffen te bestuderen, beschouwen ze als behoorlijk primitief. De huidige robots en sensoren kunnen niet tegelijkertijd de ruimtelijke en huidige diversiteit van een rif vastleggen. De onderzoekers willen de mogelijkheden van wetenschappers in het veld en de tools die ze gebruiken versterken.
Girdhar
De robot Girdhar en zijn team zullen twee basismethoden voor het observeren van een koraalrif combineren: beeldverzameling en akoestische analyse. Met de beelden kunnen wetenschappers individuele soorten en interessante locaties in een complexe omgeving identificeren. Beelden hebben echter een beperkt bereik onder water. Akoestische signalen kunnen een algemene beoordeling geven van de gezondheid van het rif, maar missen vaak gedetailleerde, soortspecifieke informatie.
Door de twee te combineren, hopen de onderzoekers dat de robot langzaam een gedetailleerd beeld kan opbouwen van de functie en gezondheid van ecosystemen, net zoals een getrainde wetenschapper dat in de loop van de tijd zou doen. Een ander nadeel van robotdetectie is dat de aanwezigheid van een bewegend voertuig dat onder water beweegt, het gedrag van de dieren die het voertuig wil observeren kan verstoren. Hierdoor kunnen dieren naar andere delen van het rif worden verspreid of zich verstoppen.
Lang liggen
Om de impact op het gedrag van dieren te verminderen, 'springt' het vaartuig door een rif. Het beweegt zich over korte afstanden en gaat vervolgens op de zeebodem liggen om gedurende langere perioden gegevens te observeren en te verzamelen. Door slechts korte bewegingen te maken, kan het voertuig ook stroom besparen, waardoor de duur van een missie aanzienlijk wordt verlengd ten opzichte van een conventionele, constant bewegende AUV. De robot kan aldus geleidelijk een beeld opleveren waar verschillende dieren samenkomen en hoe ze het rif als ecosysteem gebruiken.
De onderzoekers stellen zich voor om de robot in een rif te plaatsen en hem binnen een week of maand terug te laten komen. Dit moet een gedetailleerd begrip opleveren hoe de biodiversiteit in ruimte en tijd over het rif is verdeeld. Het zal koraalrifwetenschappers meer waar voor hun geld geven bij elke inzet.
Foto: Daniel Hentz / Woods Hole Oceanographic Institution