
30/09/2024
Door Ad Spijkers
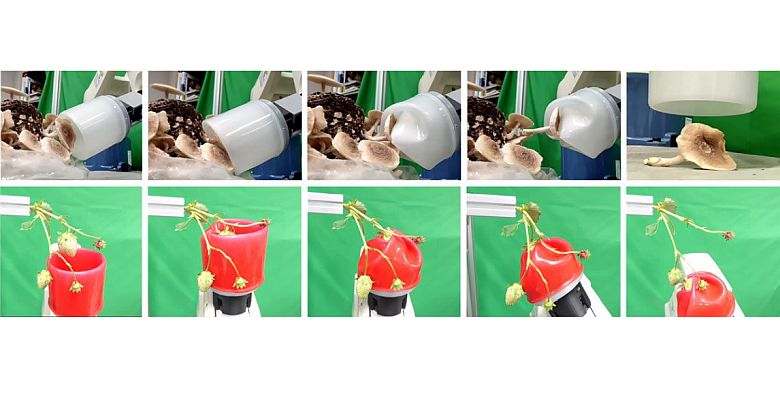
Een nieuw type grijper pakt objecten voorzichtig vast met behulp van een uniek 'rimpel'-fenomeen.
Robotgrijpers zijn onmisbaar geworden in veel sectoren, waaronder productie, verpakking en logistiek. Ze worden voornamelijk gebruikt voor pick-and-place-taken. Maar ze vinden ook toepassing in de landbouw, waar ze worden gebruikt voor oogst- en verpakkingstaken. Conventionele robotgrijpers hebben moeite met de unieke vormen, eigenschappen en delicate aard van verschillende gewassen. Daarom is er een toenemende vraag naar veelzijdigere robots die zich kunnen aanpassen aan objecten met verschillende vormen, maten en texturen.
Zachte grijper
Robotgrijpers van zachte materialen zijn een mogelijke oplossing voor het bovenstaande probleem. Huidige methoden om deze grijpers aan te passen aan complexe geometrieën vertrouwen op een complexe besturing en planning die worden gegenereerd door op gegevens gebaseerde modellen. Deze modellen vereisen een grote hoeveelheid data, wat hun algemene toepasbaarheid beperkt. Bovendien vereist het integreren van een sensorisch systeem in hun zachte lichaam complexe ontwerpen en geavanceerde fabricagemethoden.
Om dit doel te bereiken, ontwikkelde een team van onderzoekers van het Japan Advanced Institute of Science and Technology (JAIST) een innovatieve zachte robotgrijper genaamd ROtation-based Squeezing grippEr (ROSE). Het instituut is gevestigd in Ishikawa, hemelsbreed ruim 300 km westnoordwest van Tokyo.
ROSE
ROSE haalt inspiratie uit de bloeiende toestanden van een roos om grijpacties te genereren. Het concept biedt een eenvoudigere benadering van oogsten op de boerderij. Het pakt objecten voorzichtig vast met behulp van een uniek 'rimpel'-fenomeen. In tegenstelling tot conventionele grijpers, vereist ROSE geen complexe controle- en planningsstrategieën om zich aan te passen aan verschillende landbouwproducten met verschillende vormen, maten en texturen. De onderzoekers gebruikten ook een simulatiemodel om het grijpmechanisme volledig te begrijpen en te optimaliseren.
ROSE bestaat uit een geïsoleerde, komvormige kamer gevormd door twee dunne, zachte elastomeerlagen, met een scheiding tussen de binnen- en buitenlaag. De binnenste laag, die roteert met behulp van een externe motor, produceert een vervorming in de lagen. Deze draaiende beweging van de binnenste laag resulteert in een spanningsverschil tussen de buitenste en binnenste lagen. Dit leidt tot de vorming van een reeks rimpelachtige naar binnen gerichte vouwen, een proces dat 'Wrinkling' wordt genoemd. Dit mechanisme verkleint de centrale ruimte in ROSE, waardoor het elk object dat zich in deze centrale ruimte bevindt, voorzichtig kan vastpakken.
Simulatie en verificatie
Om dit mechanisme te verfijnen, bestudeerden de onderzoekers het 'rimpelingsproces' via een simulatiemodel op basis van een eindige elementen methode. De simulaties onthulden een correlatie tussen verschillende geometrische kenmerken, waaronder dikte, diameter en hoogte. De wetenschappers ontdekten met name dat een geschikte verdeling van de huiddikte van ROSE (de scheiding tussen de lagen) een aanzienlijke invloed heeft op de grijpprestaties.
De onderzoekers testten twee verschillende dikteverdelingsstrategieën, namelijk lineaire en niet-lineaire verdeling. Deze verbeterden de grijpprestaties van ROSE aanzienlijk in vergelijking met een constante dikte. Bovendien benadrukten de simulaties ook het belang van de verhouding tussen de diameter en hoogte van de grijper. De simulatieresultaten werden gevalideerd door middel van verschillende experimenten, waarbij de capaciteit van ROSE om taken uit te voeren die moeilijk zijn voor traditionele grijpers werd geverifieerd.
Toepassing
De onderzoekers hebben de praktische toepassingen van ROSE in de landbouw aangetoond bij het oogsten van aardbeien en paddenstoelen. De grijper haalde hoge succespercentages bij het oppakken van deze gewassen in meerdere proeven, ongeacht of ze stijf of zacht waren. De grijper slaagde er ook in om een kluit paddenstoelen op te pakken zonder een stuk te breken, mits de kluitgrootte binnen de grijpruimte paste.
ROSE is een van de eerste grijpers die knikvervorming als grijpmethode gebruikt. De praktische toepassing van ROSE in landbouwomgevingen is volgens de onderzoekers een game-changer voor oogsten op de boerderij. Het vermogen van ROSE om zich aan te passen aan verschillende texturen en vormen maakt de grijper effectief in deze taken. Dit verbetert niet alleen de efficiëntie, maar kan ook het groeiende tekort aan arbeidskrachten in de landbouw aanpakken, met name in regio's met een vergrijzende bevolking.
De wetenschappelijke publicatie vindt u hier.
Ill.: Van Anh Ho , JAIST