
22/08/2023
Door Ad Spijkers
Een nieuwe aanpak met fuzzy logic schat onbekende parameters in om niet-lineaire pneumatische kunstmatige spieren aan te sturen.
De afgelopen jaren zijn pneumatische kunstmatige spieren (pneumatic artificial muscles of PAM's) naar voren gekomen als veelbelovende actuatoren voor het simuleren van mensachtige bewegingen. Er worden toepassingen voorzien in verschillende industrieën, waaronder robotica, revalidatie en protheses.
PAM's zijn meestal samengesteld uit rubber en bedekt met gevlochten garen en kunnen de mechanica van menselijke spieren nabootsen. Ze kunnen verstijven en samentrekken als ze worden voorzien van perslucht en worden zachter en langer als ze lucht vrijgeven. Een PAM is echter een niet-lineair systeem en ervaart een enorme latentie, waardoor het belangrijk is om regelsystemen te hebben die hun prestaties kunnen regelen.
Regelmethoden
Het bepalen van een niet-lineair wiskundig model voor PAM is een uitdaging is. In het verleden hebben onderzoekers veel regelmethoden voorgesteld om de problemen die verband houden met PAM op te lossen. Deze traditionele regelmethoden leveren behoorlijke prestaties, maar kunnen niet omgaan met de niet-lineariteit en hysterese van PAM. Hoewel lerende regelalgoritmen theoretisch effectief zijn geweest bij het verbeteren van de prestaties van op PAM gebaseerde systemen, is de implementatie ervan in de praktijk lastig.
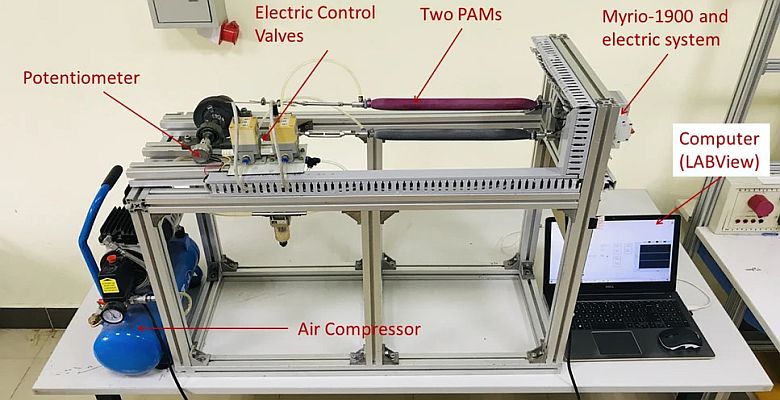
Om deze beperkingen te overwinnen en dit open probleem aan te pakken, heeft een groep Japans en Vietnamese onderzoekers aan het Shibaura Institute of Technology in Tokyo en de Hanoi University of Science and Technology een nieuwe oplossing voorgesteld. In hun studie stellen ze een nieuwe regelbenadering voor: ‘adaptive fuzzy slider mode controller (of AFSMC). Deze maakt gebruik van fuzzy logic voor het schatten van regelparameters van op PAM gebaseerde systemen.
De voorgestelde regelstrategie maakt gebruik van het Takagi-Sugeno fuzzy-algoritme om de verstoringscomponent te schatten en de waarden van de uitgangsvariabelen automatisch bij te werken. Dit geeft een verbeterde volgnauwkeurigheid en aanpasbaarheid in vergelijking met traditionele regelmethoden in glijdende modus.
Fuzzy logic
De onderzoekers ontwikkelden eerst een glijdende modusregelaar met een stuursignaal waarin een speciale variabele is verwerkt om de verstoringen in te schatten en de regelprestaties te verbeteren. Vervolgens ontwierpen ze een adaptief fuzzy-algoritme, waarbij parametervectoren van de componentregels automatisch worden bijgewerkt door een adaptieve wet om de verstoringsvariabele te berekenen. De stabiliteit van het ontwikkelde ASFMC-algoritme werd vervolgens geanalyseerd met behulp van de Lyapunov-stabiliteitsvoorwaarde (gebruikt om de stabiliteit van een niet-lineair systeem te bestuderen). Ook voerden de onderzoekers een reeks experimenten uit om de prestaties van hun controller te beoordelen door deze te vergelijken met traditionele besturingsmethoden in glijdende modus.
De AFSMC-benadering vertoonde een verbeterde volgnauwkeurigheid, met een wortelgemiddelde kwadratische foutwaarde van 2,68° bij een frequentie van 0,5 Hz onder belasting. De glijdende modusregelaar benadering vertoonde een hogere waarde van 4,21°. Bovendien vertoonde AFSMC een uitzonderlijk aanpassingsvermogen aan abrupte externe verstoringen. In een vergelijkende evaluatie met het bekende commerciële revaliditatiesysteem Lokomat leverde de AFSMC-controller vergelijkbare prestaties. Het vertoonde een goed aanpassingsvermogen aan plotselinge veranderingen in de belasting en keerde snel terug naar het gewenste traject door de besturingsoutput te manipuleren.
Vooruitzichten
Deze bevindingen wijzen op het potentieel van de AFSMC-aanpak voor integratie in robotrevalidatieapparatuur, hulpmiddelen en fysiotherapieapparatuur voor nauwkeurige en gepersonaliseerde therapie. Bovendien kan deze aanpak helpen bij het ontwerp en de ontwikkeling van geavanceerde prothetische ledematen voor verbeterde functionaliteit en revalidatieresultaten.
Volgens de onderzoekers kan binnen de komende vijf tot tien jaar worden geanticipeerd op de opkomst van een commercieel revalidatiesysteem dat wordt aangestuurd door PAM. Dit nieuwe systeem zal aanzienlijke voordelen opleveren voor patiënten, inclusief patiënten met ruggenmergletsel of een beroerte en anderen die revalidatie nodig hebben. Hoewel dit onderzoek de basis heeft gelegd voor het bevorderen van trajectvolgregeling in PAM-systemen, hopen de onderzoekers dat dit het verdere verkenning en ontwikkeling op het gebied van revalidatietechnologie zal aanwakkeren.
De wetenschappelijke publicatie vindt u hier.
Foto:Ngoc-Tam Bui, Shibaura Institute of Technology