
20/06/2022
Door Ad Spijkers
Naarmate robots steeds meer samenwerken met mensen op de fabrieksvloer, in magazijnen en elders op het werk, wordt de verdeling wie welke taken gaat uitvoeren steeds complexer en belangrijker.
Mensen zijn beter geschikt voor sommige taken, robots voor andere. En in sommige gevallen is het voordelig om tijd te besteden aan het leren van een robot om nu een taak uit te voeren en er later de vruchten van te plukken. Onderzoekers van het Robotics Institute (RI) van de Carnegie Mellon University in Pittsburgh hebben een algoritmische planner ontwikkeld die helpt bij het delegeren van taken aan mensen en robots.
Het gebruik van algoritmen en software om te beslissen hoe arbeid wordt gedelegeerd en verdeeld, is niet nieuw, zelfs niet wanneer robots deel uitmaken van een team. Dit werk is echter een van de eerste methoden die robotleren in zijn redenering opneemt.
Overwegingen
De planner, genaamd ADL (Act, Delegate or Learn) beschouwt een lijst met taken en beslist hoe deze het beste kunnen worden toegewezen. De onderzoekers stelden drie vragen:
- wanneer moet een robot een taak te voltooien?
- wanneer moet een taak worden gedelegeerd aan een mens?
- wanneer moet een robot een nieuwe taak leren?
Er zijn kosten verbonden aan beslissingen, zoals de tijd die een mens nodig heeft om een taak te voltooien, de tijd om een robot te leren een taak te voltooien en de kosten van een robot die faalt bij een taak. Gegeven deze kosten geeft ADL de optimale werkverdeling.
Het werk van het team kan van pas komen in productie- en assemblagewerkplaatsen, voor het sorteren van pakketten, eigenlijk in elke omgeving waar mensen en robots samenwerken om verschillende taken uit te voeren.
Algoritme
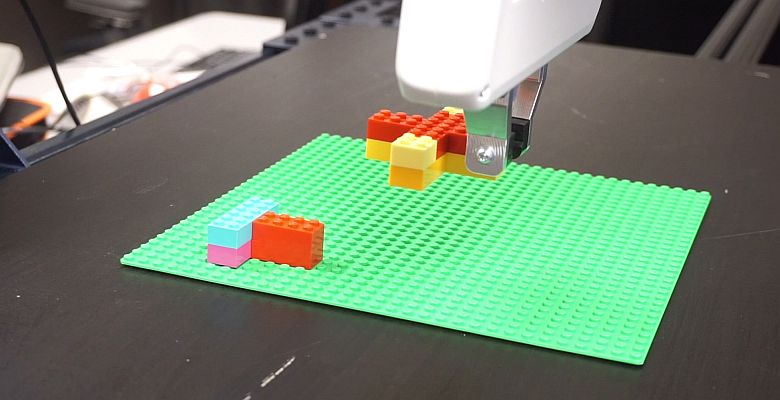
De onderzoekers testten de planner in scenario's waarin mensen en robots blokken in een ophangbord moesten plaatsen en delen van verschillende vormen en maten van Legoblokjes moesten stapelen.
Vaak manipuleert een persoon tijdens de productie handmatig een robotarm om de robot te leren hoe hij een taak moet voltooien. Het aanleren van een robot kost tijd en brengt initiële kosten met zich mee. Maar op de lange termijn kan het nuttig zijn als de robot een nieuwe vaardigheid kan leren. Een deel van de complexiteit is beslissen wanneer het het beste is om een robot een taak aan te leren of de taak aan een mens te delegeren. Dit vereist dat de robot voorspelt welke andere taken hij kan voltooien nadat hij een nieuwe taak heeft geleerd.
Op basis van deze informatie zet de planner het probleem om in een 'mixed integer' programma. Dit is een optimalisatieprogramma dat vaak wordt gebruikt bij planning, productieplanning of het ontwerpen van communicatienetwerken. Deze taken kunnen efficiënt worden opgelost met kant-en-klare software. De nieuwe planner presteerde in alle gevallen beter dan traditionele modellen en verlaagde de kosten voor het voltooien van de taken met 10% tot 15%.
Foto: Carnegie Mellon University