
16/05/2018
Door Ad Spijkers
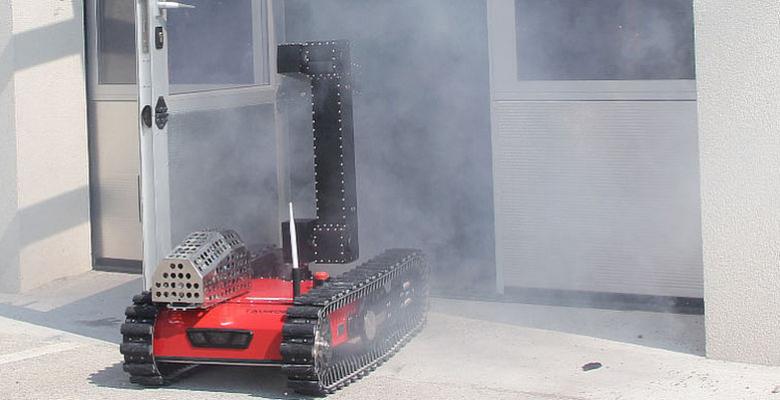
Ongevalsscenario's in onoverzichtelijke omgevingen, bij bijvoorbeeld tunnelrampen met dichte rook en sterke warmteontwikkeling, plaatsen brandweer en reddingsteams voor grote uitdagingen. Een nieuw type mobiele robot kan een handje helpen. Het prototype wordt binnenkort getest.
Wanneer het voor mensen te gevaarlijk wordt, worden steeds vaker mobiele robots ingezet. Een bekend voorbeeld is de verkenning van de nucleaire centrale in Fukushima na de tsunami in 2011. De huidige robots stuiten onder ruwe omgevingscondities echter op hun grenzen. Camera's en laserscanners geven bij rook, stof, nevel of snee vaak geen betrouwbare resultaten meer op.
SmokeBot
Het project SmokeBot van de vakgroep Echtzeitsysteme van de Fakultät für Elektrotechnik und Informatik aan de Leibniz Universität Hannover ontwikkelt samen met nationale en internationale partners een mobiele robot, die ook in moeilijke omgevingscondities kan worden ingezet. De benadering combineert innovatieve sensor- en cameratechniek, geïntegreerd in een mobiele robot. Nieuw is vooral de combinatie van de verschillende sensoren.
De robot wordt in juni in een oefencentrum van de brandweer van Dortmund in praktijkomstandigheden geteset. Dit brandweerkorps is naast universiteiten en industriële partners uit Zweden, Oostenrijk en de Verenigde Staten en het Fraunhofer Institut für Hochfrequenzphysik und Radartechnik (FHR) een van de samenwerkingspartners in het project, dat wordt gesubsidieerd in het Horizon 2020 programma van de Europese Unie.
Prototype combineert sensoren
De robot is nog een prototype. Voordat hij werkelijk bij ongevallen in tunnels, grote branden, het onschadelijk maken van bomen of gifgasaanvallen kan worden gebruikt, moeten software en hardware nog worden geoptimaliseerd voor de ruwe omgevingscondities. De benadering is echer veelbelovend. De combinatie van verschillende sensoren (camera's, laserscanners, dieptecamera's en radar– is tot op heden uniek.
In het systeem worden voor het eerst speciaal ontwikkelde roterende radarsensoren ontwikkeld. Deze zijn robuust bij slechte zichtcondities en kunnen worden gebruikt wanneer conventionele camera's en laserscanners op hun grenzen stuiten. De radarsensoren leveren echter naar verhouding onnauwkeurige meetwaarden. Daarom was het de uitdaging de radarsignalen met de nog bruikbare data van laserscanners en warmtebeeldcamera's te combineren om een zo nauwkeurig mogelijk model van de omgeving te kunnen genereren.
Bovendien worden ook 'elektronische neuzen' gebruikt, gasdetectoren die op tijd kunnen waarschuwen bij optredend gevaar. Ook is een hitteschild geïntegreerd dat bij extreme temperatuurontwikkeling openklapt en de robot beschermt. De data van het systeem kunnen bovendien worden gecombineerd met noodgevalplannen en kaarten van de brandweer worden gecombineerd en vergeleken.