
07/12/2023
Door Ad Spijkers
Een nieuwe studie naar onbemande onderwatervoertuigen biedt perspectieven voor andere adaptieve besturingssystemen.
Onbemande onderwatervoertuigen (UUV's) worden over de hele wereld gebruikt om moeilijke milieu-, afgelegen, oceanische, defensie- en reddingsmissies uit te voeren in vaak onvoorspelbare en zware omstandigheden. Een nieuwe studie onder leiding van Flinders University in Adelaide (Zuid-Australië) en Franse onderzoekers heeft een bio-geïnspireerde computer- en kunstmatige intelligentie-oplossing gebruikt. Hiermee is het potentieel van UUV's en andere adaptieve besturingssystemen te verbeteren, dit om betrouwbaarder te werken in ruwe zeeën en andere onvoorspelbare omstandigheden.
BIER
Bij de aanpak wordt gebruik gemaakt van de Biologically-Inspired Experience Replay (BIER)-methode. In tegenstelling tot conventionele methoden streeft BIER er naar de inefficiëntie van data en de achteruitgang van de prestaties te overwinnen door gebruik te maken van onvolledige maar waardevolle recente ervaringen. De uitkomsten van het onderzoek toonden aan dat BIER de standaard Experience Replay-methoden overtrof en optimale prestaties tweemaal zo snel behaalde als laatstgenoemde in het veronderstelde UUV-domein.
De methode toonde een goede aanpassingsvermogen en efficiëntie en toonde zijn vermogen om de UUV te stabiliseren in gevarieerde en uitdagende omstandigheden. De methode omvat twee geheugenbuffers: één die zich richt op recente staatsactieparen en de andere de nadruk legt op positieve beloningen.
Testen
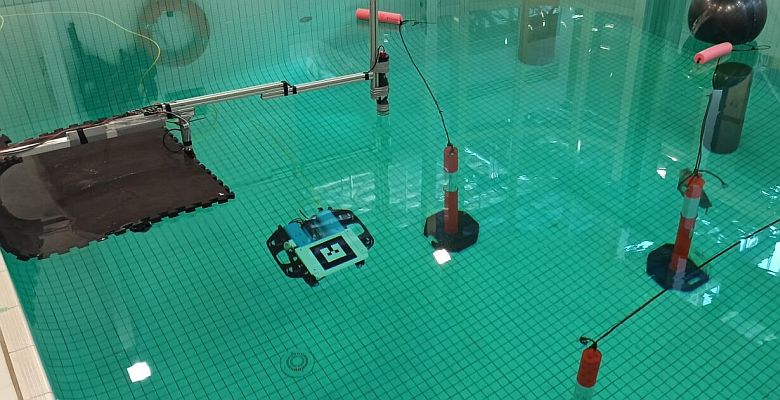
Om de effectiviteit van de voorgestelde methode te testen, voerden onderzoekers gesimuleerde scenario's uit met behulp van een op een robotbesturingssysteem (ROS) gebaseerde UUV-simulator (foto) en verhoogden ze geleidelijk de complexiteit van de scenario's. Deze scenario's varieerden in doelsnelheidswaarden en de intensiteit van stroomverstoringen.
De onderzoekers noemen het succes van de BIER-methode veelbelovend voor het verbeteren van het aanpassingsvermogen en de prestaties op verschillende gebieden die dynamische, adaptieve controlesystemen vereisen. De capaciteiten van UUV’s op het gebied van kartering, beeldvorming en sensorbediening worden snel verbeterd, onder meer dankzij Deep Reinforcement Learning (DRL), dat snel de adaptieve controlereacties op onderwaterverstoringen verbetert waarmee UUV’s te maken kunnen krijgen.
Variaties
De efficiëntie van deze methoden wordt echter op de proef gesteld wanneer ze worden geconfronteerd met onvoorziene variaties in toepassingen in de echte wereld. De complexe dynamiek van de onderwateromgeving beperkt de waarneembaarheid van UUV-manoeuvreertaken, waardoor het moeilijk wordt voor bestaande methoden om optimaal te presteren.
De introductie van BIER markeert een belangrijke stap voorwaarts in het vergroten van de effectiviteit van de diepgaande leermethode in het algemeen. Het vermogen om efficiënt door onzekere en dynamische omgevingen te navigeren betekent een veelbelovende vooruitgang op het gebied van adaptieve besturingssystemen, concluderen onderzoekers.
De wetenschappelijke publicatie vindt u hier.
Foto: Thomas Chaffre, Flinders University