
23/07/2021
Door Ad Spijkers
Een nieuwe methode om robothanden te ontwerpen, helpt bij het optimaliseren van complexe vormen voor toekomstige taken.
De meeste robothanden zijn ontworpen voor algemene doeleinden, omdat het kostbaar is om taakspecifieke handen te maken. Bestaande ontwerpmethoden zoeken een tussenweg tussen de noodzakelijke complexiteit en de beperkingen van productie en contact maken.
Onderzoekers van het MIT ontwikkelden een nieuwe methode om de vorm en besturing van een robothand voor een specifieke taak te optimaliseren. Ze gebruiken software om het ontwerp te manipuleren, de robot die een taak uitvoert te simuleren en een optimalisatiescore te geven om het ontwerp en de besturing te beoordelen.
Eenvoudige vormen
Om de functionaliteit van het systeem te testen, creëerde het team eerst een ontwerp met een enkele robotvinger om een doos op de grond om te draaien. De vingertop werd geoptimaliseerd door een algoritme om aan de achterkant van de doos te haken en deze om te draaien.
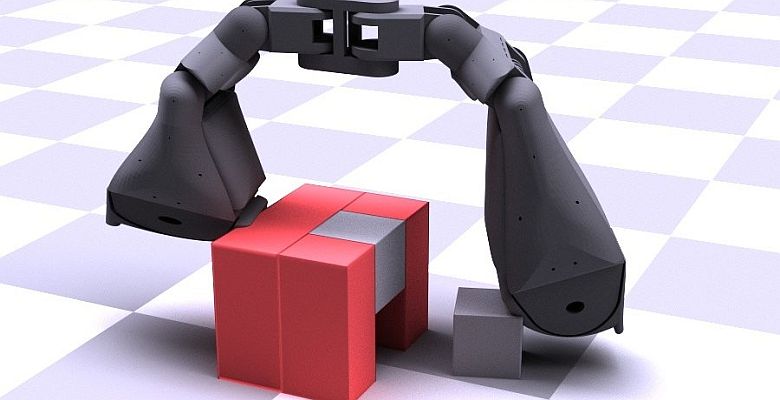
De onderzoekers ontwikkelden vervolgens een model voor een montagetaak, waarbij een ontwerp met twee vingers een kleine kubus in een grotere, verplaatsbare houder plaatste. Omdat de vingers twee verschillende lengtes hadden, konden ze twee objecten van verschillende afmetingen pakken. De grotere en vlakkere oppervlakken van de vingers hielpen het object stabiel te duwen.
Traditioneel gaat een optimalisatieproces uit van eenvoudige vormen om elk onderdeel van een robotontwerp te benaderen. Bij het maken van bijvoorbeeld een robotvinger met drie segmenten, zou deze waarschijnlijk worden benaderd door drie verbonden cilinders. Het algoritme optimaliseert lengte en straal om het gewenste ontwerp en de gewenste vorm te bereiken. Dit vereenvoudigt het optimalisatieprobleem, maar de eenvoudige vorm beperkt complexere ontwerpen en uiteindelijk complexe taken.
Kooi
Om complexere manipulatoren te creëren, gebruikte het team een techniek die 'kooi gebaseerde vervorming' wordt genoemd. Hiermee kan de gebruiker de geometrie van een vorm real-time veranderen of vervormen.
Met behulp van de software zou men bijvoorbeeld iets dat op een kooi lijkt, rond de robotvinger plaatsen. Het algoritme kan de afmetingen van de kooi wijzigen om meer verfijnde, natuurlijke vormen te maken. De verschillende variaties van ontwerpen behouden nog steeds hun integriteit, zodat ze gemakkelijk kunnen worden gefabriceerd.
Simulator
Het team heeft een simulator ontwikkeld om het ontwerp van de robothand en de besturing van een taak te simuleren, die vervolgens een prestatiescore oplevert. Met behulp van de simulatietools hoeven de onderzoekers het ontwerp niet te evalueren door het eerst in de echte wereld te produceren en te testen.
De op kooien gebaseerde representatie en de simulator maken het gebruik van krachtige, op gradiënten gebaseerde methoden mogelijk. De onderzoekers vinden hiermee niet alleen betere oplossingen, maar vinden ze ook sneller. Hierdoor kunnen ze het ontwerp snel evalueren en de ontwerpcyclus aanzienlijk verkorten.
In de toekomst wil het team de software uitbreiden om robothanden gelijktijdig te optimaliseren voor meerdere taken.
Foto: MIT CSAIL