
07/10/2024
Door Ad Spijkers
Studenten aan Fontys Hogeschool Venlo ontwikkelen een innovatieve onkruid wiedende robot.
Onkruid vergaat niet. Het bestrijden daarentegen kan op allerlei manieren. Maar het gebruik van chemische bestrijdingsmiddelen wordt steeds meer aan banden gelegd. Bovendien is het vinden van arbeidskrachten een groeiend probleem in de tuinbouw. Techniek kan de oplossing bieden: met een onkruid wiedende robot.
Concrete vraag
Het project RoseGuardian komt voort uit een vraag van Frank Coenders Kwekerijen in Grubbenvorst. Deze rozenkwekerij wil onkruid bestrijden zonder chemische middelen. Handwerk is te duur, maar een autonoom apparaat door het veld laten rijden zonder de plant en de bodem te beschadigen is interessant. Het bedrijf legde contact met Compas Agro in Venlo dat zich inzet voor innovatieve projecten. Onkruid afdekken, wegbranden en elektrocuteren zijn mogelijkheden, maar Coenders Kwekerijen wilde het mechanisch. Het probleem is dat die wiedmachines vaak te groot zijn voor kleine teelten, zoals rozen. De kwekerij zocht een oplossing die effectief en kleinschalig was.
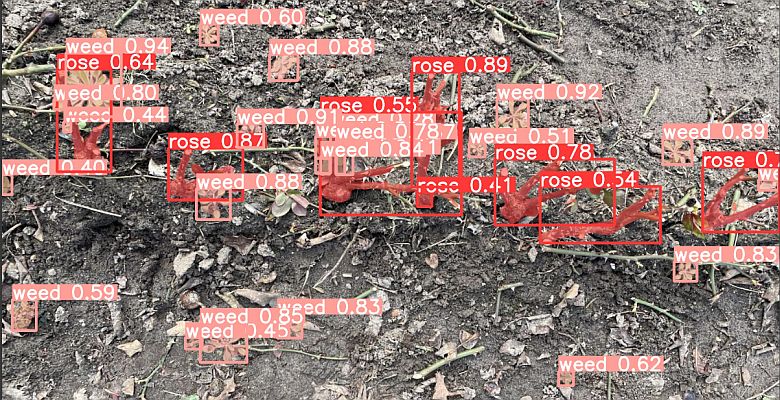
Compas Agro zag hierin een uitgelezen kans voor studenten om op onderzoek uit te gaan. Op de Brightlands-campus in Venlo heeft het bedrijf proefvelden waar studenten hun vondsten kunnen uitproberen. Er werden twee groepen studenten aan het werk gezet. De ene groep focuste zich op het herkennen van onkruid met camera’s, de andere groep ontwierp een mechanische wiedmachine ontwierp.
GreenTechLab
Het project wordt begeleid vanuit het GreenTechLab, onderdeel van de onderzoekslijn Smart Sustainable Solutions van Fontys in Venlo. Het onderzoek vindt plaats in het kader van een minor waarbij studenten hun theoretische kennis toepassen in de praktijk. Ze hebben veel vrijheid in hun aanpak en dat leidt soms tot verrassende ideeën. Een daarvan was een machine die onkruid herkent en vervolgens de grond inboort. Een innovatief concept dat in de praktijk helaas te traag bleek.
Een van de innovaties die de groep studenten inzet, is het gebruik van een Xbox-controller om de robot te besturen. Ze gebruiken het Robot Operating System (ROS) om de robot te kunnen programmeren. Via een Xbox-controller kunnen ze de robot in de simulatie besturen en later ook op het veld.
Robot voor de toekomst
De resultaten zijn veelbelovend, maar er zijn nog uitdagingen te overwinnen. De kunst is om een robot te ontwikkelen die het onkruid effectief kan verwijderen zonder schade aan te richten aan de kwetsbare rozenplant. Een rozenplant beschadigen, gaat dat direct ten koste van de opbrengst. De robot moet dus nauwkeurig werken, maarook snel. Onkruid moet zo snel mogelijk worden verwijderd, anders wordt het probleem alleen maar groter.
Compas Agro is optimistisch over de uitkomst. Het duurt misschien langer dan gedacht, maar er is vertrouwen dat er uiteindelijk een werkbare oplossing komt.
Foto: Fontys