
05/08/2022
Door Ad Spijkers
De door AI-aangestuurde microbots kunnen adaptief schakelen tussen verschillende locomotorische gangen om zelfstandig naar elke doellocatie te navigeren.
Onderzoekers van de Santa Clara University Californië), het New Jersey Institute of Technology in Newark (NJ) en de University of Hong Kong zijn erin geslaagd microrobots met succes te leren zwemmen via deep reinforcement learning. Dit is een sprong voorwaarts in het microzwemmen.
Er is grote interesse in het ontwikkelen van kunstmatige microrobots die in de wereld kunnen bewegen op dezelfde manier als natuurlijke zwemmende micro-organismen, zoals bacteriën. Microrobots zijn interessant voor een breed scala aan toekomstige biomedische toepassingen, zoals gerichte medicijnafgifte en microchirurgie. Maar de meeste kunstmatige microrobots kunnen tot nu toe alleen relatief eenvoudige manoeuvres uitvoeren met vaste patronen.
Gebruik van AI
De onderzoekers redeneerden dat microrobots met behulp van kunstmatige intelligentie konden leren en zich aanpassen aan veranderende omstandigheden. Mensen en dieren die leren zwemmen hebben terugkoppeling nodig om te blijven drijven en in verschillende richtingen te bewegen onder veranderende omstandigheden. Zo moeten microrobots dat ook, zij het met hun unieke reeks uitdagingen die worden opgelegd door de natuurkunde in de microscopische wereld.
Zelf kunnen zwemmen op microschaal is een uitdagende taak. Als een onderzoeker wil dat een microrobot meer geavanceerde manoeuvres uitvoert, kan het ontwerp van hun af te leggen trajecten snel onhandelbaar worden.
Door kunstmatige neurale netwerken te combineren met reinforcement learning, leerde het team met succes een eenvoudige microrobot zwemmen en navigeren in een willekeurige richting. Wanneer de robot op een bepaalde manier beweegt, krijgt hij terugkoppeling over zijn specifieke actie. De robot leert dan geleidelijk hoe hij moet zwemmen op basis van zijn ervaringen in interactie met de omgeving.
Leren zwemmen
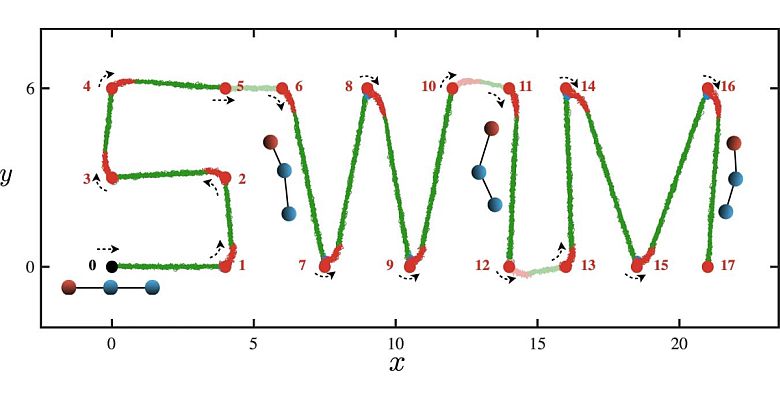
Net als een mens die leert zwemmen, leert de microrobot hoe hij zijn 'lichaamsdelen' - in dit geval drie microdeeltjes en uitbreidbare verbindingen - moet bewegen om zichzelf voort te stuwen en te draaien. Hij doet dit zonder te vertrouwen op menselijke kennis, maar alleen op een machine learning algoritme. De door AI aangestuurde robot kan adaptief schakelen tussen verschillende bewegingsrichtingen om zelfstandig naar elke doellocatie te navigeren.
Als demonstratie van het vermogen van de robot toonden de onderzoekers aan dat hij een complex pad kon volgen zonder expliciet geprogrammeerd te zijn. Ze demonstreerden ook de robuuste prestaties van de robot bij het navigeren onder de verstoringen die het gevolg zijn van externe vloeistofstromen.
Eerste stap
Het is de eerste stap in het aangaan van de uitdaging om microrobots te ontwikkelen die zich net als biologische cellen kunnen aanpassen om autonoom door complexe omgevingen te navigeren. Dergelijk adaptief gedrag is cruciaal voor toekomstige biomedische toepassingen van kunstmatige microrobots in complexe media met ongecontroleerde en onvoorspelbare omgevingsfactoren.
Het werk is er een belangrijk voorbeeld van, hoe de snelle ontwikkeling van kunstmatige intelligentie kan worden benut om onopgeloste uitdagingen op het gebied van voortbewegingsproblemen in de vloeistofdynamica aan te pakken. De integratie tussen machine learning en microrobots in dit werk zal leiden tot verdere verbindingen tussen deze twee actieve onderzoeksgebieden.
De wetenschappelijke publicatie vindt u hier.
Foto: Zonghao Zou, Santa Clara University