
24/08/2023
Door Ad Spijkers
De robot vertoont tactiele gevoeligheid die dicht bij behendigheid op menselijk niveau ligt en gebruikt AI om over zijn acties te informeren.
Het nieuwe Bi-Touch-systeem is ontworpen door wetenschappers van de University of Bristol en gevestigd in het Bristol Robotics Laboratory. De robots kunnen taken voor twee handen uitvoeren door van een digitale helper te voelen wat ze moeten doen. De bevindingen laten zien hoe een AI-agent zijn omgeving interpreteert door middel van tactiele en proprioceptieve feedback. Vervolgens controleert de agent het gedrag van de robots, waardoor precieze detectie, zachte interactie en effectieve objectmanipulatie mogelijk worden om robottaken uit te voeren.
Met twee handen
Met het Bi-Touch-systeem zijn AI-agenten binnen een paar uur te trainen in een virtuele wereld om bimanuele taken uit te voeren die zijn afgestemd op aanraking. Nog belangrijker is, dadt de onderzoekers deze agenten zonder verdere training rechtstreeks vanuit de virtuele wereld in de echte wereld kunnen toepassen. De tactiele tweehandige agent kan zelfs onder onverwachte verstoringen taken oplossen en delicate voorwerpen op een zachte manier manipuleren.
Manipulatie met twee handen en tactiele feedback kan de sleutel zijn tot robotbehendigheid op menselijk niveau. Dit onderwerp wordt echter minder onderzocht dan opstellingen met één arm. Deels komt dit door de beschikbaarheid van geschikte hardware en de complexiteit van het ontwerpen van effectieve controllers voor taken met relatief grote ruimtes voor het uitvoeren van handelingen. Het team kon een tactiel robotsysteem met twee armen ontwikkelen met behulp van recente ontwikkelingen op het gebied van AI en robotachtige tactiele detectie.
Deep-RL
De onderzoekers bouwden een virtuele wereld (simulatie) met daarin twee robotarmen voorzien van tactiele sensoren. Vervolgens ontwerpen ze beloningsfuncties en een mechanisme voor het bijwerken van doelen dat de robotagenten zou kunnen aanmoedigen om de bimanuele taken te leren uitvoeren. Ook ontwikkelden ze een tactiel robotsysteem met twee armen in de echte wereld waarop ze de agent rechtstreeks konden toepassen.
De robot leert bimanuele vaardigheden door middel van Deep Reinforcement Learning (Deep-RL), een van de meest geavanceerde technieken op het gebied van robotleren. De methode is ontworpen om robots dingen te leren door ze met vallen en opstaan te laten leren, vergelijkbaar met het trainen van een hond met beloningen en straffen.
Bij robotmanipulatie leert de robot beslissingen te nemen door verschillende gedragingen uit te voeren om bepaalde taken uit te voeren. Dat is bijvoorbeeld het optillen van voorwerpen zonder ze te laten vallen of te breken. Als het lukt, krijgt hij een beloning; als het niet lukt, leert hij wat het niet moet doen. Na verloop van tijd ontdekt de agent de beste manieren om dingen te pakken met behulp van deze beloningen en straffen.
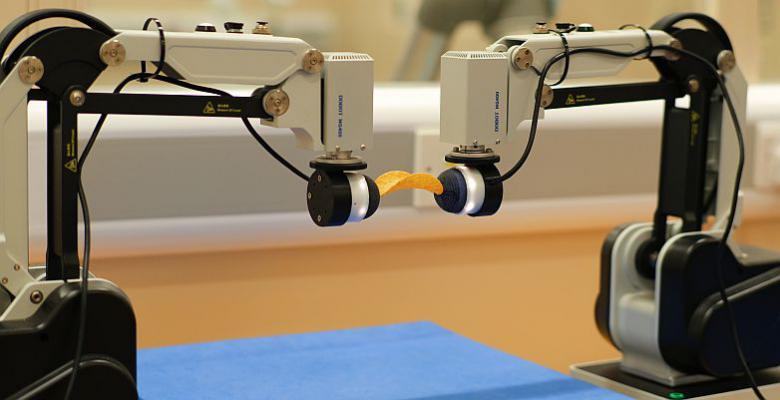
De AI-agent is visueel blind en vertrouwt alleen op proprioceptieve feedback: het vermogen van een lichaam om beweging, actie en locatie waar te nemen, en tactiele feedback. De onderzoekers slaagden erin de robot met twee armen met succes items zo kwetsbaar als een enkele Pringle-chip veilig op te laten tillen.
Vervolg
Het Bi-Touch-systeem toont een veelbelovende aanpak met betaalbare software en hardware voor het leren van bimanueel gedrag met aanraking in simulatie, dat direct kan worden toegepast op de echte wereld. De ontwikkelde tactiele dual-arm robotsimulatie maakt verder onderzoek naar meer verschillende taken mogelijk. De code zal open-source zijn, wat ideaal is voor het ontwikkelen van andere downstream-taken.
Met het Bi-Touch-systeem kan een tactiele robot met twee armen veel leren van simulatie en om in de echte wereld op een zachte manier verschillende manipulatietaken uit te voeren. De onderzoekers kunnen AI-agenten binnen een paar uur in een virtuele wereld trainen om bimanuele taken uit te voeren die zijn afgestemd op de aanraking. Deze ontwikkeling zou een grote verandering teweeg kunnen brengen in sectoren als de fruitpluk en de huishoudelijke dienstverlening. Uiteindelijk zou het systeem de aanraking op kunstmatige ledematen opnieuw tot stand kunnen brengen.
Foto: Yijong Lin, Unversity of Bristol