
02/10/2024
Door Ad Spijkers
DFKI optimaliseert systeemontwikkeling met hybride AI en menselijke terugkoppeling.
De nieuwste ontwikkelingen op het gebied van robotica brengen de visie van robots die complexe taken uitvoeren als persoonlijke assistenten en interactiepartners voor de mens binnen handbereik. Onderzoekers van het Deutsches Forschungszentrums für Künstliche Intelligenz (DFKI) in Bremen hebben een belangrijke stap in deze richting gezet. Het is onderdeel van het M-Rock-project, dat wordt gefinancierd door het Bundesministerium für Bildung und Forschung (BMBF).
Eigen inbreng
Met behulp van innovatieve benaderingen op basis van hybride AI-methoden en menselijke terugkoppeling konden de onderzoekers de veiligheid en het aanpassingsvermogen van robotgedrag aanzienlijk vergroten.
De voortschrijdende digitalisering, krachtige hardware en op AI gebaseerde dataverwerking creëren de voorwaarden voor robots om flexibele en veilige AI-assistenten van de toekomst te zijn. Deze moeten zich kunnen aanpassen aan een grote verscheidenheid aan omgevingen en eisen - of het nu gaat om productie, logistiek, zorg of het dagelijks leven. De aanvaarding ervan hangt echter in belangrijke mate af van het vermogen om ze individueel te ontwerpen. Dit is precies waar het inmiddels voltooide M-Rock-project begon. Het doel is dat mensen zonder specialistische kennis op maat gemaakte robots voor hun toepassingen kunnen ontwikkelen.
Terugkoppeling
Bij een eerder project lag de focus op het bouwen van een uitgebreide database van modulaire robotcomponenten. Een vervolgproject op de hierin ontwikkelde aanpak maakt het automatisch in kaart brengen van complexe hardware- en softwarestructuren aan concreet robotgedrag mogelijk met behulp van hybride AI-methoden zoals machinaal leren en structureel redeneren.
M-Rock breidt deze aanpak uit door menselijke terugkoppeling te integreren. Dit is niet alleen om het gedrag aan te passen aan de individuele vereisten van de gebruiker op het gebied van software. Het maakt ook de daaropvolgende optimalisatie op het gebied van gedrag en hardwareselectie mogelijk. Het project biedt niet alleen een oplossing voor de continue aanpassing van robots tijdens bedrijf, maar is ook een hulpmiddel voor het personaliseren van robotontwerp en -gedrag.
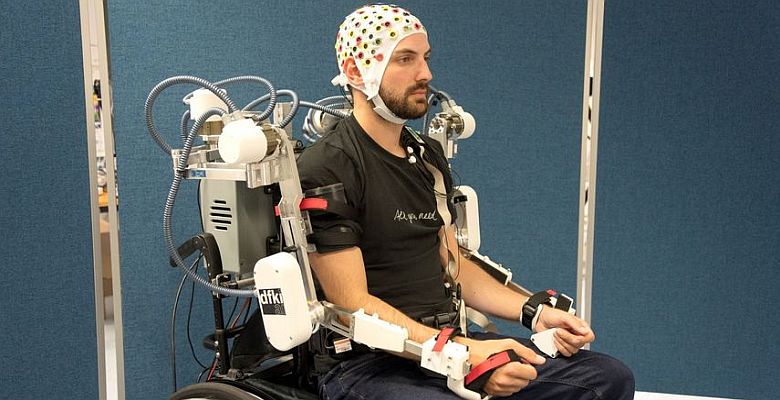
Een centrale innovatie van M-Rock is de combinatie van expliciete terugkoppeling (bijvoorbeeld in de vorm van schaalbeoordelingen) met impliciete terugkoppeling zoals hersen- en spieractiviteit (EEG- en EMG-data). Doel is een robot automatisch aan te passen aan de individuele eisen en voorkeuren van de gebruiker.
Onderzoeken
Om de rol van menselijke terugkoppeling te onderzoeken, voerden de onderzoekers uit Bremen vier onderzoeken uit. Hiervoor registreerden ze EEG-data van proefpersonen die fouten constateerden in continu robotgedrag en in menselijk gedrag. De onderzoekers analyseerden vervolgens de data met betrekking tot het zogenaamde foutgerelateerde potentieel, dat in het menselijk brein wordt geactiveerd wanneer wangedrag wordt herkend.
In verdere onderzoeken werd zowel impliciete als expliciete terugkoppeling verzameld. Enerzijds gebeurde dit bij proefpersonen die het verkeerde gedrag opmerkten van een elleboogorthese die ze droegen, anderzijds bij het waarnemen van foutgedrag aan een slingerrobot. De analyse van de EEG-data toonde in alle onderzoeken een hoge nauwkeurigheid van foutgerelateerde potentiële detectie aan.
Het is aangetoond dat impliciete terugkoppeling fouten in real-time kan detecteren, of het nu gaat om robots, menselijke bewegingen of orthesen. Dit kan op zijn beurt door het systeem worden gebruikt om automatisch aanpassingen door te voeren zonder dat de gebruiker actief hoeft in te grijpen.
Cognitieve kernen
Een ander resultaat van M-Rock is de verdere ontwikkeling van de eerder geïntroduceerde Cognitive Cores (CC’s) tot Optimal Cognitive Cores (OCC’s) door middel van methoden voor optimale controle. OCC's maken het genereren en uitvoeren van natuurlijk gedrag voor complexe systemen mogelijk en verbeteren de menselijke interactie door nauwkeurige beschrijvingen van robottaken.
De onderzoekers gebruiken wiskundige modellen om optimale oplossingen te vinden voor complexe besturingsproblemen, waarbij ze rekening houden met factoren als energieverbruik, tijd en veiligheid. In experimenten met de mensachtige robot RH5 slaagden de onderzoekers erin om met behulp van OCC’s met succes dans- en loopbewegingen te genereren.
Menselijke terugkoppeling kan helpen de Optimal Cognitive Cores (OCC’s) te verbeteren en zo het robotgedrag te verfijnen. Het wordt gebruikt om kostenfuncties te creëren die helpen bij het plannen van optimale trajecten. Hierdoor kan de robot op basis van menselijke evaluaties leren welke bewegingen efficiënt zijn en kan hij beter reageren op dynamische omgevingen.
Scenario's
De in M-Rock ontwikkelde technologieën werden geëvalueerd in twee toepassingsscenario's. In het eerste scenario testten de onderzoekers de zogenaamde 'assist as needed' aanpak van een exoskelet dat de robotondersteuning individueel aanpast aan de gebruiker. De proefpersonen voerden verschillende armbewegingen uit, terwijl hun spieractiviteit (EMG-data) als terugkoppeling diende voor een neuraal netwerk om gewrichtskrachten te voorspellen. De resultaten toonden aan dat het exoskelet op basis van de EMG-data de respectievelijke capaciteiten van de gebruiker kan beoordelen en hen voor elk gewricht flexibel en individueel kan ondersteunen.
In het tweede scenario lag de focus op de gezamenlijke optimalisatie van gedrags- en ontwerpparameters van een vierbenige robot voor sprongen en achterwaartse salto's. Optimal Cognitive Cores (OCC's) hielpen de bewegingen van de robot aan te passen aan de uit te voeren taak en de optimale morfologie te selecteren. Uit tests op het echte systeem bleek dat langere dijen voor voorwaartse sprongen en langere onderbenen voor achterwaartse salto's de beste resultaten opleverden.
Foto: DFKI, Meltem Fischer