
12/12/2024
Door Ad Spijkers
Kleine aanpassingen aan de lichaamsmassa en de grootte van de bal van een robot kunnen zijn balancerende vermogens aanzienlijk verbeteren.
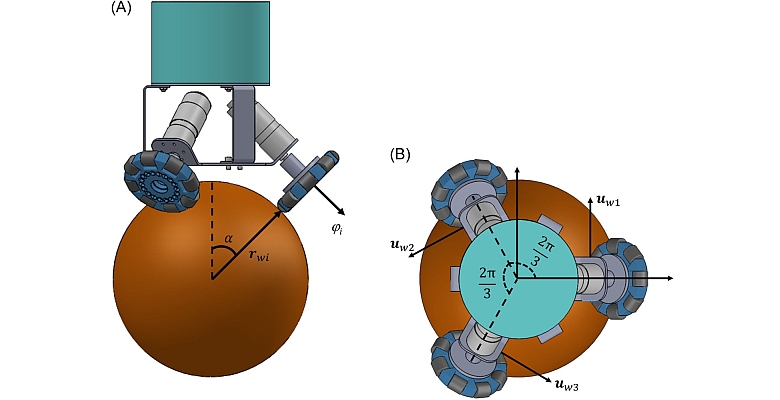
Een Vietname studie richt zich op de ballbot, een robot die is ontworpen om op een bal te balanceren. Het is een dynamisch stabiele mobiele robot die is ontworpen om te balanceren op een enkel bolvormig wiel. Door zijn enkele contactpunt met de grond is een ballbot omnidirectioneel en dus wendbaar, manoeuvreerbaar en organisch in beweging vergeleken met andere grondvoertuigen. Zijn dynamische stabiliteit zorgt voor een betere besturing in smalle, drukke en dynamische omgevingen.
Ogenschijnlijk eenvoudige ontwerpwijzigingen kunnen leiden tot dramatische verbeteringen in prestaties. De aanpak heeft het potentieel om robots stabieler en betrouwbaarder te maken in alledaagse toepassingen, waardoor ze dichter bij onmisbare partners in ons dagelijks leven komen.
Dynamiek van de ballbot
Het roboticaveld ontwikkelt zich snel, met een groeiende nadruk op het verbeteren van de autonomie en interactie van machines. Omdat robots steeds complexere activiteiten moeten uitvoeren, wordt hun vermogen om effectief te werken in dynamische en onvoorspelbare omgevingen cruciaal.
Een belangrijke uitdaging is het ontwikkelen van robots die hun evenwicht kunnen bewaren terwijl ze door dergelijke omgevingen navigeren. De ballbot is een voorbeeld van zo'n uitdaging. Gezien deze complexiteit is verder onderzoek nodig om de parametrische configuraties te optimaliseren die de regelprestaties van balancerende robots zoals de ballbot bepalen.
Onderzoekers van de faculteit Werktuigbouwkunde aan de University of Danang – University of Science and Technology in Vietnam hebben aanzienlijke vooruitgang geboekt in het begrijpen van het dynamische gedrag van de ballbot. Hun studie biedt een diepgaande blik op het wiskundige model van ballbot en introduceert een Linear Quadratic Regulator (LQR) controller om zijn bewegingen nauwkeurig af te stemmen, wat zorgt voor een betere balans en stabiliteit.
Ontwerp
De studie duikt in de ontwerpkenmerken van de balancerende robot. De onderzoekers hebben de hardware van de robot verfijnd door een vierwielige inverse muis-balaandrijving en een gier-aandrijfmechanisme toe te voegen. Door deze toevoegingen kan de ballbot 360° om zijn verticale as te draaien, wat zijn wendbaarheid in beperkte of complexe omgevingen verbetert. Wanneer hij stilstaat, zorgt een statiefmechanisme voor stabiliteit.
Voor de robot is een besturingsarchitectuur ontwikkeld waarbij zijn vermogen om naadloos te balanceren en navigeren centraal staat. Een belangrijke innovatie is de introductie van een trajectplanningsalgoritme, waarmee de ballbot soepel van rust naar beweging kan overgaan terwijl hij vooraf bepaalde paden volgt.
De studie toont aan hoe deze ontwikkelingen dynamische interactie tussen mens en robot mogelijk maken, waardoor de ballbot een stabiele en responsieve partner wordt in menselijke omgevingen. Door dit onderzoek kunnen de robots zich gemakkelijker aanpassen aan wisselende omstandigheden in toepassingen in de echte wereld.
Afstemming
De studie benadrukt het belang van het nauwkeurig afstemmen van parametrische configuraties om de besturingsprestaties van de ballbot te optimaliseren. Door deze parameters aan te passen, kunnen ontwikkelaars de stabiliteit en wendbaarheid van de robot verbeteren. Dit is essentieel voor het creëren van efficiëntere en betrouwbaardere robots die in verschillende omgevingen kunnen helpen."
De implicaties van dit onderzoek reiken verder dan de ballbot. Met verbeterde besturingsstrategieën kunnen robots een belangrijke rol spelen in sectoren die nauwkeurige balans en wendbaarheid vereisen, zoals productie, logistiek en zoek- en reddingsoperaties. Deze ontwikkelingen zijn cruciaal voor de toekomstige inzet van robots in dynamische omgevingen, waar stabiliteit en betrouwbaarheid van het grootste belang zijn. Door de grenzen van robotbesturingssystemen te verleggen, markeert deze studie een stap in de richting van de integratie van autonome robots in het dagelijks leven en werk.
De wetenschappelijke publicatie vindt u hier.
Ill.: International Journal of Mechanical System Dynamics