
07/11/2024
Door Ad Spijkers
Een plesiosaurus-achtige robot maakt gebruik van het bio-geïnspireerde bewegingssysteem van dit reeds lang uitgestorven zeereptiel.
Uitgestorven dieren hebben sterk verschillende lichaamsvormen van dieren die er vandaag de dag nog zijn. Dit maakt het moeilijk om te bepalen hoe ze bewogen door ze te vergelijken met levende soorten. Bovendien bevatten fossielen zelden de zachte ledemaatweefsels die wetenschappers nodig hebben om voortbeweging te bestuderen en belangrijke inzichten te krijgen in hun levensstijl.
Een internationale onderzoeksgroep heeft mogelijk het mysterie achter de voortbeweging van de Plesiosaurus ontrafeld door een bio-geïnspireerd controlesysteem te recreëren dat rekening houdt met bewegingsaanpassing.
Controle
Plesiosaurussen zwierven door de prehistorische oceanen van de aarde, voortgestuwd door hun unieke lichaamsstructuur, die vier grote, even grote vinnen had. Toch is de manier waarop plesiosauriërs deze vinnen gebruikten om te zwemmen, paleontologen al lang een raadsel. Dit zogenaamde 'viervleugelprobleem' is al jaren onderwerp van debat.
Een onderzoeksgroep heeft een nieuwe aanpak ontwikkeld om dit mysterie op te lossen. In plaats van zich alleen te richten op hoe water interageert met plesiosauriërlichamen – dat wil zeggen: de hydrodynamica van zwemmen – besloot het team te onderzoeken hoe deze dieren hun bewegingen controleerden. Plesiosauriërs moeten immers in staat zijn geweest om met verschillende snelheden en onder verschillende omstandigheden te zwemmen. De onderzoekers zijn verbonden aan de Tohoku University in Sendai (350 km noordelijk van Tokyo), Kanagawa University in Yokohama en de University of Manchester.
Naar een robot
De onderzoekers lieten zich inspireren door de coördinatiemechanismen tussen ledematen die ten grondslag liggen aan de flexibele looppatronen die worden gebruikt door andere viervoetige gewervelde dieren, zoals honden en katten. Ze ontwikkelden een autonoom gedecentraliseerd controlesysteem voor een plesiosauriër-achtige robot. Experimenten lieten zien dat het controlesysteem succesvol gecoördineerde patronen genereerde tussen de voor- en achtervinnen als reactie op veranderingen in de flapcyclus en morfologie.
De nieuwe aanpak reconstrueert de manier waarop uitgestorven dieren hun bewegingspatronen op een flexibele, situatie-afhankelijke manier kunnen aanpassen. Het betekent ook dat wetenschappers het volledige bewegingsrepertoire van andere uitgestorven dieren kunnen gaan onderzoeken en meer te weten kunnen komen over hun levensstijl.
Vervolg
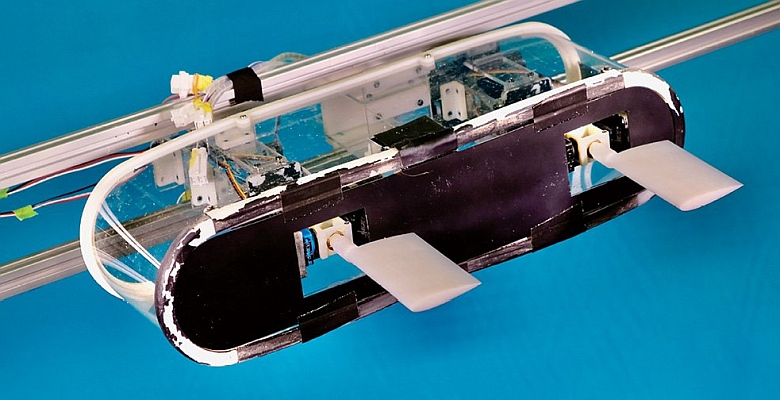
Vooruitkijkend hoopt de onderzoeksgroep bewegingsreconstructies te maken die rekening houden met andere aspecten van plesiosauriër-lichamen. Plesiosauriërs stonden erom bekend dat ze een lange nek hadden, maar deze lengtes varieerden aanzienlijk per individu. De onderzoekers hopen modellen te creëren die de rollen van de nek, het hoofd en de romp in het besturen van de bewegingen van deze oude wezens omvat. En dat biedt weer mogelijkheden voor toekomstige robotica. De foto toont een robot die een reconstrutie vormt van de zwemstijlen van een plesiosauriër met behulp van bio-mimetische besturing.
De wetenschappelijke publicatie vindt u hier.
Foto: Akira Fukuhara