
12/04/2023
Door Ad Spijkers
Fraunhofer IWU, Synapticon en NexCobot hebben een nieuwe veiligheidsarchitectuur voor robots ontwikkeld.
Robots bedoeld voor samenwerking met mensen (cobots) stellen hoge eisen aan de veiligheid van de bewegingssequenties. De centrale veiligheidsmodule moet gegevens van talrijke sensoren verwerken, wat veel kabelverbindingen vereist voor sensoren en actuatoren in traditionele robotarchitecturen en eigen oplossingen. Het Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik (IWU) in Chemnitz, Synapticon in Schönaich (20 km zuidwestelijk van Stuttgart) en NexCobot uit Taiwan hebben een nieuwe veiligheidsarchitectuur ontwikkeld.
Met het gedecentraliseerd ontworpen systeem kunnen mensen en industriële robots veilig samenwerken, zelfs wanneer de werksituatie dynamisch verandert, en met aanzienlijk minder bekabeling. Er hoeven alleen stroom- en communicatieverbindingen naar de aandrijvingen te worden geleid. Omdat de veiligheid van de bewegingsprocessen direct op de aandrijfas wordt bewaakt, is de reactietijd aanzienlijk minder.
Architectuur
De kern van de oplossing is een gedecentraliseerde, generieke besturingsarchitectuur die op maat is gemaakt voor adaptieve en dynamische cobots in collaboratieve toepassingen. De centrale veiligheidscontroller berekent in welke bewegingsgebieden of werksituaties de robot zich in samenwerking met verminderde snelheid of met beperkt vermogen en kracht moet verplaatsen.
Het systeem omvat robotonafhankelijke, veilige bewegingscontrollers voor fail-safe collaboratieve robots met EtherCAT (FSoE) en real-time berekening van compacte dynamische veiligheidsgebieden. Het is geschikt voor efficiënte en flexibele toepassingen met samenwerking tussen mens en robot. Een intelligent veiligheidssysteem bewaakt de relevante gebieden en past de robotbesturing aan elke denkbare interactie tussen mens en robot aan.
Partner
NexCobot is bij de nieuwe architectuur betrokken met zijn RobaSafe SIL 2/SIL 3 robotbesturingsoplossing. Dit verkort de ontwikkelingstijden en biedt de prestaties die nodig zijn om zowel computerprocessen als veiligheidsgerelateerde functies op één en hetzelfde processorbord te ondersteunen. Dit betekent dat het aantal benodigde hardwarecomponenten in veel toepassingsscenario's kan worden verminderd.
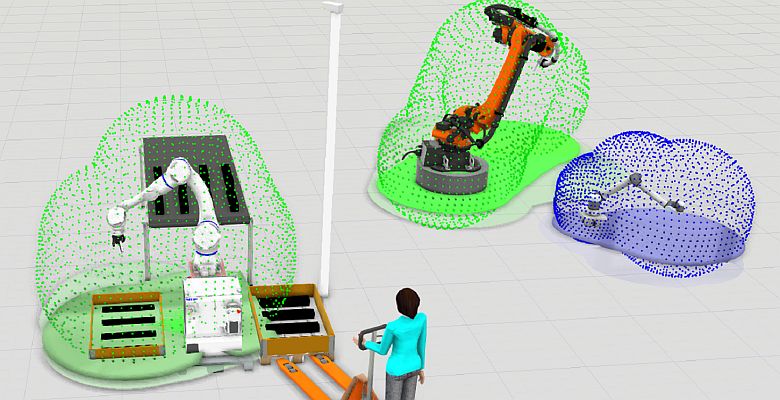
In de nieuwe veiligheidsarchitectuur is RobaSafe SIL 2/SIL 3 gekoppeld aan het dynamische 3D-werkgebiedbewakingssysteem DynaSafe dat is ontwikkeld op Fraunhofer IWU. Dankzij DynaSafe wordt de hele fabriek een veilige werkruimte gedeeld door mens en machine. DynaSafe draagt hieraan bij met:
- een generiek, modulair beveiligingssysteem (hardware en software)
- 3D-detectie, tracking en classificatie van mensen en bewegende objecten
- real-time berekening en bewaking van dynamische, compacte beveiligingsruimten
- virtuele creatie en validatie van het beveiligingsconcept
Synapticon ontwikkelt en produceert software en hardware voor geavanceerde motion controls in robotica en hightech machines. Zijn compacte, efficiënte, krachtige en gedecentraliseerde servoaandrijvingen nemen de motion control over in de nieuwe architectuuroplossing.
Ill: Fraunhofer IWU