
05/01/2024
Door Ad Spijkers
Amerikaanse onderzoekers werken aan een controlemodel dat naadloos beweegt tussen verschillende activiteiten zoals staan, lopen en traplopen.
Van zitten naar staan, van staan naar lopen, trappen op en af, hellingen – het menselijk lichaam schakelt soepel tussen deze activiteiten. Maar deze overgangen zijn moeilijk voor robots. Voor robotachtige protheses geldt ook nog eens, dat ze niet zijn verbonden met het centrale zenuwstelsel van de mens om gesynchroniseerd te blijven met hun lichaam.
Robotprothesebeen
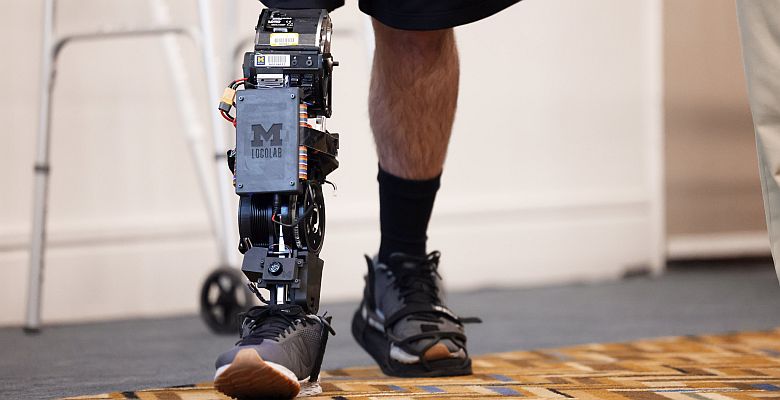
Een soepelere ervaring voor gebruikers van robotprothesebeen – dat is het doel van een ontwikkelproject aan de University of Michigan in Ann Arbor (70 km westelijk van Detroit). Een subsidie van het National Institute of Health moet de implementatie mogelijk maken van het verbeterde controleprogramma op een in de handel verkrijgbaar robotprothetisch been.
De onderzoekers werken daar al sinds 2013 aan. Al vroeg succes volgden ze voor het beheersen van de positie van de knie- en enkelgewrichten een model dat continu alle stadia van de loopcyclus weergeeft. Voorheen gebruikten robotachtige prothesebenen afzonderlijke controllers voor elke fase van de loopcyclus, zoals het hielcontact, de afzet en de zwaai.
Maar elke persoon heeft verschillende parameters omdat elke persoon anders loopt. En dat resulteerde in een omslachtige klinische implementatie. Hierdoor moesten controleparameters voor elk model en de regels voor het overstappen van het ene model naar het andere voor elke patiënt worden geoptimaliseerd. Het gebruik van de beweging van het dijbeen om de gewrichtspositie te voorspellen met een continu model bleek een redelijk goede manier om een natuurlijk looppatroon te creëren.
Biomechanica
In 2018 breidden de onderzoekers hun loopcontrolemodel uit naar andere belangrijke scenario's: hellingen, trappen, zitten-naar-staan en staan-naar-lopen. Ze konden deze activiteiten uitvoeren met behulp van meer typische biomechanica met behulp van het robotbeen dan met passieve protheses. Het vastpinnen van het controlealgoritme op gewrichtshoeken leidt echter tot een meer rigide ervaring bij het veranderen van activiteiten.
Maar een robotprothese heeft sterke motoren. Als de gebruiker de positie aanstuurt en deze op de een of andere manier onverenigbaar is met de omgeving, kan de prothese erg stijf en schokkend aanvoelen. Dat kan pijn betekenen voor geamputeerden waar het ledemaat de koker raakt.
In plaats van de biomechanische impedantie na te bootsen, kijken de onderzoekers nu naar het indirect controleren van de gezamenlijke positie met behulp van een continu modelleringsraamwerk. Met een impedantiebenadering is er een evenwichtspositie en worden de krachten zo ingesteld dat ze het gewricht voorzichtig terugtrekken in die positie als het verstoord is. Dit zorgt voor enige speelruimte.
De onderzoekers vergelijken het met de vering van een auto. Dat bestaat uit een veer en een schokabsorberend mechanisme. Dit systeem kan een kuil raken en voldoende veerkracht hebben om de schok te verzachten, maar het mag niet voor altijd blijven oscilleren. Een vergelijkbaar mechanisme zou een robotprotesebeen in staat moeten stellen hetzelfde vermogen te bieden om naadloos van de ene activiteit naar de andere te gaan, terwijl het ook een comfortabele beweging biedt.
Programmering
De programmering van het been is gebaseerd op biomechanische metingen van mensen met twee biologische benen, in een poging de beweging te reproduceren waarvoor de heupen en de rug zijn ontwikkeld. Gebruikers van passieve beenprothesen ervaren vaak pijn in de heupen, rug en organische knie door de manier waarop ze het eigen gewicht van het beenprothese moeten compenseren.
De onderzoekers verkrijgen de metingen voor het bepalen van de biomechanische eigenschappen van het been met behulp van een exoskelet. Dit biedt meestal geen hulp, maar zorgt af en toe voor een snelle verstoring die het ledemaat verplaatst. Uit deze metingen kunnen de onderzoekers de mechanische impedantie bepalen, inclusief eigenschappen als stijfheid, viscositeit en traagheid.
Power Knee
De besturingsprogramma's zullen eerst worden getest op het robotbeen dat de onderzoekers in eigen huis hebben gebouwd, met motoren om zowel de enkel als de knie aan te drijven. Om te zien of de nieuwe algoritmen nu klaar zijn om mensen te helpen, zal het team ze vervolgens testen op Power Knee prothesebeen van Össur. Deze fabrikant heeft zijn hoofdkantoor op IJsland en een vestiging in Eindhoven. Behalve het meten van de biomechanica van studiedeelnemers terwijl ze met de prothesebenen lopen, zal het onderzoeksteam formele terugkoppeling verzamelen om de toename van het comfort en de pijnvermindering te kwantificeren.
De Power Knee heeft een verende, passieve enkel met een kleiner bewegingsbereik, maar is ook lichter dan het laboratoriumbeen. Het belangrijkste is dat het mensen nu helpt lopen. Het onderzoeksteam heeft er vertrouwen in dat ze hun besturingsmodel kunnen aanpassen om eraan te werken. Dat zou een verbetering kunnen opleveren ten opzichte van de modellen die Össur momenteel gebruikt.
Foto: University of Michigan