
10/10/2024
Door Ad Spijkers
Onderzoekers van de University of Science and Technology of China in Hefei hebben een zachte robotachtige 'vinger' ontwikkeld met een geavanceerd tastgevoel. Er kunnen routinematige onderzoeken in de dokterspraktijk mee worden uitgevoerd, waaronder het opnemen van de polsslag van een patiënt en het controleren op abnormale knobbeltjes.
De technologie zou het voor artsen gemakkelijker kunnen maken om ziekten zoals borstkanker in een vroeg stadium op te sporen, wanneer ze beter te behandelen zijn. Het kan patiënten ook helpen zich op hun gemak te voelen tijdens lichamelijke onderzoeken die ongemakkelijk en invasief kunnen lijken. Door verdere ontwikkeling om de efficiëntie te verbeteren, kan volgens de onderzoekers een behendige hand van dergelijke vingers fungeren als een 'Robodoctor' in een toekomstig ziekenhuis. In combinatie met machine learning kan automatisch robotisch onderzoek en diagnose worden bereikt, wat vooral gunstig is voor ebieden waar een ernstig tekort is aan gezondheidswerkers.
Er bestaan al rigide robotvingers maar deze zijn mogelijk niet geschikt voor de delicate taken die nodig zijn in een dokterspraktijk. Sommige deskundigen hebben gewezen op mogelijke veiligheidsproblemen, waaronder de angst dat overijverige robotvingers tijdens onderzoeken bulten kunnen scheuren. Meer recent hebben wetenschappers lichtgewicht, veilige en goedkope zachte robotica ontwikkeld die de bewegingen van menselijke handen kunnen nabootsen. Deze apparaten zijn echter niet in staat geweest om de complexe eigenschappen van objecten die ze aanraken te detecteren zoals echte vingers dat doen.
Ontwikkeling
Ondanks de opmerkelijke vooruitgang in het afgelopen decennium hebben de meeste zachte vingers die in de literatuur worden gepresenteerd nog steeds aanzienlijke hiaten in vergelijking met menselijke handen. De onderzoekers merken op dat robotvingers nog niet klaar zijn om scenario's in de praktijk aan te kunnen.
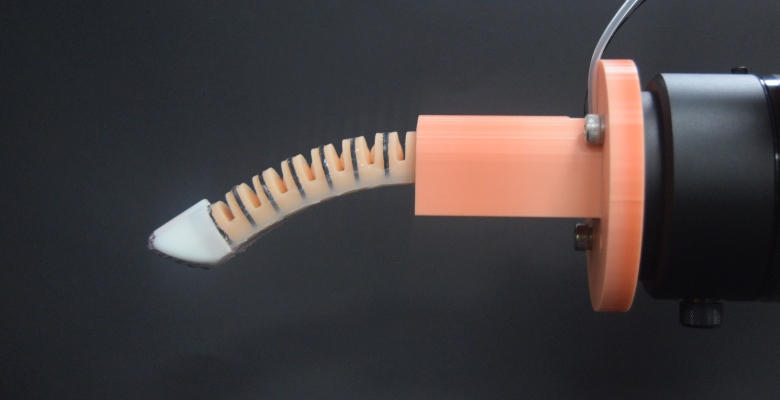
Om de uitdaging te overwinnen, ontwikkelden de onderzoekers een eenvoudig apparaat dat geleidende vezelspoelen bevat met twee delen. Het ene is een spoel die op elke luchtkamer van de buigactuatoren van het apparaat is gewikkeld , het andere een gedraaide vloeibare metaalvezel die op de vingertop is gemonteerd. Door eigenschappen te meten die van invloed zijn op de elektrische stroom van het apparaat, kon het onderzoeksteam in real-time controleren hoe ver de vinger buigt als deze een object aanraakt en de kracht op de vingertop. Op deze manier kon het apparaat de eigenschappen van een object net zo effectief waarnemen als menselijke aanraking.
Testen
Om het apparaat te testen, begonnen de onderzoekers met het strijken van een veer langs de vingertop. De verandering in weerstand duidt op de hoge gevoeligheid voor krachtdetectie. Vervolgens tikten en duwden ze met een glazen staaf op de vingertop en bogen ze de vinger herhaaldelijk. Ze observeerden dat de sensoren van het apparaat het type en de hoeveelheid kracht die ze toepasten nauwkeurig waarnamen.
Om de medische vaardigheden van de vinger te testen, monteerden ze hem op een robotarm. Vervolgens keken ze toe hoe de vinger drie knobbeltjes identificeerde die in een groot siliconenvel waren ingebed, en erop drukte zoals een dokter dat zou doen. Terwijl hij op de robotarm was gemonteerd, lokaliseerde de vinger ook correct een slagader op de pols van een deelnemer en nam zijn pols op.
Mensen kunnen de stijfheid van verschillende objecten gemakkelijk herkennen door er simpelweg met hun vinger op te drukken. Omdat het apparaat zowel de buigvervorming als de kracht op de vingertop kan detecteren, kan het ook stijfheid detecteren die vergelijkbaar is met die van de menselijke hand door simpelweg op een object te drukken. Behalve het opnemen van pulsen en het onderzoeken van gesimuleerde knobbeltjes, ontdekten de onderzoekers dat de robotvinger kan typen 'als een menselijke hand', door het woord 'hallo' te spellen.
Vervolg
De onderzoekers gaan extra sensoren gebruiken om nog meer flexibiliteit in de gewrichten van de robotvinger te creëren, waardoor het apparaat in meerdere richtingen kan bewegen zoals een menselijke vinger. De 'vinger' kan in de nabije toekomst klaar zijn om effectieve en efficiënte medische onderzoeken uit te voeren, concluderen de onderzoekers.
De onderzoekers hopen een intelligente, behendige hand te ontwikkelen, samen met een sensorische kunstmatige spiergestuurde robotarm. Hiermee willen ze de ongeëvenaarde functies en fijne manipulaties van de menselijke handen na bootsen.
De wetenschappelijke publicatie vindt u hier.
Foto: Yufeng Wang