
02/07/2024
Door Ad Spijkers
Onderzoekers hebben een lichtgewicht hydromotor ontwikkeld om zachte, spieren nabootsende robots aan te drijven voor gebruik in hulpmiddelen.
Om het gedrag van spieren na te bootsen op manieren die starre robots niet kunnen, kunnen zachte robots worden aangedreven door hydraulische of pneumatische motoren. Volgens onderzoekers aan de North Carolina State University in Raleigh maakt dit robots aantrekkelijk voor gebruik in hulpmiddelen die het vermogen van mensen verbeteren om hun bovenste of onderste ledematen te bewegen.
De meeste fluïdische motoren zijn echter fysiek verbonden met een externe krachtbron, zoals een hydropomp of compressor. Dat beperkt hun nut aanzienlijk. Eerdere fluïdische motoren die niet aan externe krachtbronnen waren gekoppeld, konden niet veel kracht genereren, wat ook hun bruikbaarheid beperkte.
Hydromotor
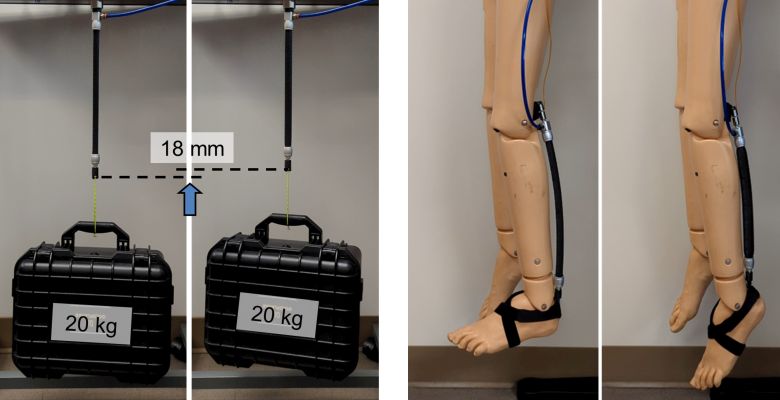
Het onderzoek in Raleigh richt zich op beide uitdagingen. De hier ontwikkelde hydromotor is niet verbonden met een externe bron, maar kan nog steeds tot 580 N aan kracht genereren. De motor pompt olie in en uit een kamer in een zachte robot, waardoor deze fungeert als een kunstmatige spier die buigt en ontspant. De pomp van de vloeistofmotor wordt aangedreven door een door batterijen aangedreven motor met hoog koppel. Deze kan aanzienlijke druk genereren, waardoor de kunstmatige spier een flinke kracht kan uitoefenen.
Bij proof of concept-testen beoordeelden de onderzoekers niet alleen de hoeveelheid kracht die de nieuwe motor kan genereren, maar ook hoe efficiënt de motor elektrisch vermogen omzet in vloeistofkracht. Ze ontdekten dat ze veel kracht konden genereren voor een ongebonden motor, terwijl we toch het gewicht van de vloeistofmotor laag konden houden. Volgens de onderzoekers is de maximale efficiëntie van hun hydromotor hoger dan die van eerdere draagbare, ongebonden motoren.
De wetenschappelijke publicatie vindt u hier.
Foto: Antonio Di Lallo, North Carolina State University