
02/12/2020
Door Ad Spijkers
Een nieuwe systeem van MIT-onderzoekers optimaliseert de vorm van robots voor het doorkruisen van verschillende soorten terrein.
Stel u hebt een robot nodig die de trap op gaat. Welke vorm moet die robot hebben? Moet het twee benen hebben, zoals een mens? Of zes, zoals een mier? Het kiezen van de juiste vorm zal van vitaal belang zijn voor het vermogen van een robot om een bepaald terrein te doorkruisen. En het is onmogelijk om elke mogelijke vorm te bouwen en te testen. Een aan het Massachusetts Institute of Technology ontwikkeld systeem het mogelijk om ze te simuleren en te bepalen welk ontwerp het beste werkt.
De ontwerper begint met het systeem, RoboGrammar genaamd, te vertellen welke robotonderdelen uw wilt gebruiken: wielen, gewrichten, etc. Hij vertelt ook welk terrein de robot moet betreden. RoboGrammar doet de rest en genereert een geoptimaliseerde structuur en besturingsprogramma voor de robot.
Het programma kan een dosis door computerondersteunde creativiteit kan in het veld brengen. Robotontwerp is nog steeds een zeer handmatig proces. RoboGrammar is een manier om met nieuwe, meer inventieve robotontwerpen te komen die mogelijk effectiever zouden kunnen zijn.
Basisregels
Robots zijn gebouwd voor een bijna eindeloze variëteit aan taken, maar ze lijken allemaal erg op elkaar in hun algemene vorm en ontwerp. Wie bijvoorbeeld denkt aan het bouwen van een robot die verschillende terreinen moet doorkruisen, denkt meteen naar een viervoeter. De onderzoekers vroegen zich echter af of dat wel het optimale ontwerp is. Een meer innovatief ontwerp zou de functionaliteit kunnen verbeteren. Dus bouwden ze een computermodel voor de taak - een systeem dat niet al te zeer werd beïnvloed door eerdere conventies. En hoewel inventiviteit het doel was, moesten de onderzoekers wel een aantal basisregels vaststellen.
Er zijn talloze robotvormen te bedenken, maar "voornamelijk uit onzinnige ontwerpen", aldus de onderzoekers. Door de onderdelen op een willekeurige manier met elkaar te verbinden, ontstaat een warboel. Om dat te voorkomen, ontwikkelden ze een 'grafiekgrammatica', een reeks beperkingen voor de opstelling van de onderdelen van een robot. Zo moeten bijvoorbeeld de aangrenzende beensegmenten met een koppeling worden verbonden, niet met een ander legsegment. Dergelijke regels zorgen ervoor dat elk door een computer gegenereerd ontwerp werkt, op zijn minst op rudimentair niveau.
De onderzoekers zijn voor de regels van de grafiekgrammatica niet geïnspireerd door andere robots, maar door dieren, met name geleedpotigen zoals insecten, spinnen en kreeften. Als groep zijn geleedpotigen een evolutionair succesverhaal, goed voor meer dan 80 procent van de bekende diersoorten. Ze worden gekenmerkt door een centraal lichaam met een variabel aantal segmenten. Sommige segmenten kunnen poten hebben. De onderzoekers merkten dat dat genoeg is om niet alleen geleedpotigen te beschrijven, maar ook meer bekende vormen, inclusief viervoeters.
De onderzoekers namen de op geleedpotigen geïnspireerde regels over, maar voegden er wel wat mechanische elementen aan toe. Zo lieten de computer bijvoorbeeld wielen toepassen in plaats van poten.
RoboGrammar
Met behulp van grafiekgrammatica werkt RoboGrammar in drie opeenvolgende stappen: het definiëren van het probleem, het opstellen van mogelijke robotoplossingen en vervolgens het selecteren van de optimale oplossingen. De probleemstelling valt grotendeels onder de verantwoordelijkheid van de menselijke gebruiker, die de beschikbare robotcomponenten, zoals motoren, poten en verbindingssegmenten, invoert. De gebruiker specificeert ook de verscheidenheid van het terrein dat moet worden betreden. Dat kan combinaties van elementen zoals trappen, vlakke gebieden of gladde oppervlakken omvatten.
Met deze input gebruikt RoboGrammar de regels van de grafiekgrammatica om honderdduizenden potentiële robotstructuren te ontwerpen. Sommige lijken vaag op een racewagen, anderen op een spin of een mens die een push-up doet. Het was behoorlijk inspirerend voor de onderzoekers om de verscheidenheid aan ontwerpen te zien. Het laat de expressiviteit van de grammatica zien. Maar hoewel de grammatica de hoeveelheid ontwerpen doet toenemen, zijn deze niet altijd van optimale kwaliteit.

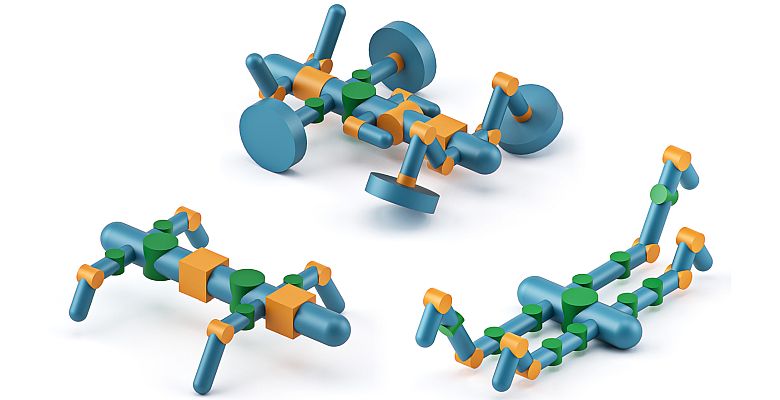
Een selectie van de best presterende ontwerpen die met RoboGrammar werden gegenereerd. De ontwerpen kunnen over geribbelde texturen, vlakke landschappen, een bevroren meer, en vlak terrein lopen.
Structuur en besturing
Het kiezen van het beste robotontwerp vereist het controleren van de bewegingen van elke robot en het evalueren van zijn functie. Tot dan toe zijn deze robots slechts structuren. Een besturing brengt de structuren tot leven en regelt de bewegingsvolgorde van de verschillende motoren van de robot. Het ontwikkelteam heeft voor elke robot een controller ontwikkeld met een algoritme genaamd Model Predictive Control, dat prioriteit geeft aan snelle voorwaartse bewegingen.
De vorm en de besturing van de robot zijn diep met elkaar verweven. Daarom moet voor elke robot afzonderlijk een besturing worden geoptimaliseerd. Zodra elke gesimuleerde robot vrij is om te bewegen, zoeken de onderzoekers naar hoog presterende robots met een grafiekheuristische zoektocht'. Dit neurale netwerkalgoritme bemonstert en evalueert iteratief sets van robots en leert welke ontwerpen beter werken voor een bepaalde taak. De heuristische functie verbetert in de loop van de tijd, en de zoektocht convergeert naar de optimale robot. Dit gebeurt allemaal voordat de menselijke ontwerper ooit maar één schroef oppakt.
Naar de praktijk
De onderzoekers bedoelen het systeem als vonk voor de menselijke creativiteit. RoboGrammar is een hulpmiddel voor robotontwerpers om de ruimte van robotstructuren die ze gebruiken uit te breiden. Om de haalbaarheid ervan aan te tonen, is het ontwikkelteam van plan om enkele van RoboGrammar's optimale robots te bouwen en te testen in de echte wereld.
Het systeem kan worden aangepast om robotachtige doelen na te streven die verder gaan dan het doorkruisen van het terrein. RoboGrammar kan helpen om virtuele werelden te bevolken.
En hoe zit het met die traplopende robot? De meeste ontwerpen werden uiteindelijk wel viervoeters. Misschien hadden de manuele robotontwerpers gelijk door meteen naar viervoeters te gaan. Maar de uitkomst had ook anders kunnen zijn.
De bovenste foto toont verschillende robotontwerpen die met RoboGrammar zijn gegenereerd. Foto's: MIT.