
07/08/2024
Door Ad Spijkers
Japanse onderzoekers ontwikkelden een nieuw, op deep learning gebaseerd systeem voor vorm- en contactdetectie van continuümrobots.
In de natuur vertonen veel organismen, zoals octopussen met hun flexibele tentakels of olifanten met hun slurf, opmerkelijke behendigheid. Geïnspireerd door deze natuurlijke structuren, streven onderzoekers ernaar om flexibele continuümrobots te ontwikkelen die robuustheid en veiligheid bieden. Idealiter wordt een continuümrobot gekenmerkt door veel vrijheidsgraden (DOF's) en het aantal gewrichten, meer dan nodig is voor de meeste taken. Hierdoor kunnen ze hun vorm dynamisch aanpassen en wijzigen, waardoor ze obstakels en onverwachte situaties kunnen vermijden. Hun complexe bewegingen maken het echter lastig om hun vorm en beweging te karakteriseren.
Doelstelling
Traditionele analytische technieken om de kinematische en dynamische problemen van continuümrobots op te lossen, zijn afhankelijk van complexe modellen, waardoor de rekenkosten toenemen. Als alternatief kunnen ingebouwde flexibele sensoren worden gebruikt om hun vorm en beweging te volgen. Maar deze methode vereist veel sensoren met een lage resolutie, waardoor het systeem omslachtig wordt. Een veelbelovende oplossing is het gebruik van één sensormodule aan het einde van een continuümrobot. Eerdere studies in deze richting hebben zich echter vooral gericht op de houding van de robot en hebben geen aandacht besteed aan contactdetectie.
Om deze kloof te dichten, heeft een team van onderzoekers een nieuw systeem ontwikkeld genaamd ConTac. Het team wordt geleid door het Japan Advanced Institute of Science and Technology (JAIST) in Ishikawa, bij 300 km NNO van Osaka. Dit systeem kan de vorm en het contact van een robotarm met zachte huid schatten. Het uiteindelijke doel van dit systeem is om te worden geïmplementeerd in een continuümrobot. In de het huidig onderzoek hebben de onderzoekers zich gericht op perceptie met behulp van een gearticuleerde robotarm en zachte huid voor verificatie.
Opbouw
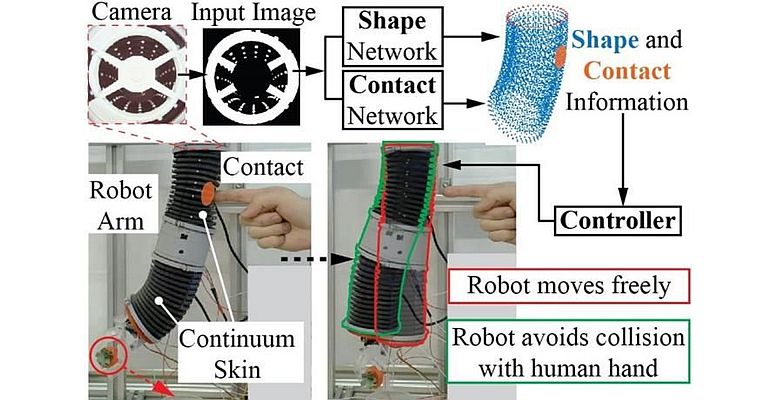
Het ConTac-systeem bestaat uit een ruggengraat die de buiging van een continuümrobot nabootst. Het omvat een zachte huid met markeringen, een camera om huidvervorming te observeren, modellen voor vorm- en contactdetectie van de huid en een contactbewust regelregime. Dit systeem kan worden toegepast op elke ConTac-eenheid of elke andere robot met hetzelfde mechanisme en dezelfde vorm zonder enige kalibratie.
Een ConTac-eenheid is een geassembleerde continuüm-geëmuleerde robotarm met een ruggengraat en zachte huid. De onderzoekers ontwikkelden ook een op admittantie gebaseerde controller voor dit systeem (het omgekeerde van impedantie). Deze controller gebruikt die uit sensoren verkregen informatie gebruikt om de bewegingen van de robotarm te sturen. Bovendien is de ConTac-eenheid betaalbaar en kan worden vervaardigd uit conventionele materialen
Het systeem maakt gebruik van twee deep learning modellen voor vormreconstructie en contactdetectie van de zachte continuümhuid. De modellen werden getraind met behulp van simulatiebeelden en vervolgens direct aangepast aan echte robots zonder fijnafstelling, wat tijd en middelen bespaarde. De overdraagbaarheid van het systeem werd getest op twee verschillende ConTac-eenheden, die vergelijkbaar presteerden zonder enige extra aanpassingen.
Het vervolg
Het ConTac-systeem is bedoeld voor gebruik in verschillende robotsystemen zonder de noodzaak van complexe aanpassingen. Flexibele robotarmen die zijn uitgerust met dit systeem zijn geschikt voor slimme landbouw- en gezondheidszorgdiensten. Hier moeten robots door omgevingen met veel obstakels navigeren en veilig met mensen omgaan. De zachtheid en flexibiliteit in combinatie met het vermogen om de omgeving te voelen, maken ze geschikt voor interactie met planten en patiënten.
De sensor- en besturingsprincipes die in dit raamwerk worden gebruikt, kunnen leiden tot nieuwe tactiele sensoren die aan elk bestaand robotsysteem kunnen worden bevestigd. Hierdoor worden nieuwe sensor- en besturingsparadigma's voor veilige interactie tussen mens en robot geboden zonder het oorspronkelijke ontwerp van de robot te wijzigen. Een maatschappij waarin elke robot en machine een tastzin bezit, zou industrieën en het dagelijks leven kunnen veranderen.
De wetenschappelijke publicatie vindt u hier.
Ill.: prof. Van Anh Ho, JAIST