
13/05/2024
Door Ad Spijkers
Een nieuwe toolkit integreert CAD in de planning, modellering en uitvoering van robotica-bewegingen.
Het Southwest Research Institute (SwRI) in San Antonio (Texas) vereenvoudigt het programmeren van robotica met een nieuwe toolkit. Deze integreert computerondersteund ontwerp (CAD) in de planning, modellering en uitvoering van robotica-bewegingen. De SwRI Workbench for Offline Robotics Development (Sword) heeft een gebruiksvriendelijke grafische interface om de fundamentele codering, die vereist is bij de ontwikkeling van robotbesturingssystemen (ROS), te verduidelijken.
Workflow
SwRI heeft de toolkit ontwikkeld vanuit zijn rol bij het ondersteunen van de ROS gemeenschap. Met Sword kunnen productietechnici CAD-kennis inzetten om complexere mogelijkheden binnen de ROS-codebase te ontsluiten. SwRI beheert het ROS Industrial Americas Consortium en ondersteunt ROS-I-softwarerepository's, waarbij trainingen en ontwikkelaarsevenementen worden uitgevoerd.
De traditionele ROS-workflow is programmeerintensief, waardoor ontwikkelaars goed bekend moeten zijn met de beschikbare ROS-bibliotheken en -tools. Zelfs ervaren ROS-ontwikkelaars kunnen veel tijd besteden aan de initiële installatie en configuratie. De ontwikkelaars in San Antonio hebben geluisterd naar ROS-experts en consortiumleden om Sword te ontwikkelen om gemakkelijker toegang te bieden tot de ROS-tools voor bewegingsplanning. Tegelijkertijd hielden ze vast aan een CAD-gebaseerde omgeving waar niet-ontwikkelaars mee bekend zijn.
Toolkit
Sword beschikt over een grafische toolkit voor het opzetten van bewegingsplanningsomgevingen en botsingsgeometrieën. Het kan ook geavanceerde robottoepassingen voor bewegingsplanning testen. De toolkit biedt een grafische interface voor veel krachtige bewegingsplanningsbibliotheken. Het doel is om ROS aan te passen voor productie- en industriële doelgroepen op een manier die beter benaderbaar is in een vertrouwde omgeving.
Het pakket is ontworpen voor zowel robotica-ontwikkelaars als productietechnici die bekend zijn met CAD-processen en -programma's op procesgeoriënteerde systemen. Sword biedt dit publiek geavanceerde mogelijkheden voor bewegingsplanning, waardoor ze kunnen profiteren van deze geavanceerde tools in hun operationele omgevingen.
Functies
De belangrijkste functies in Sword zijn onder meer:
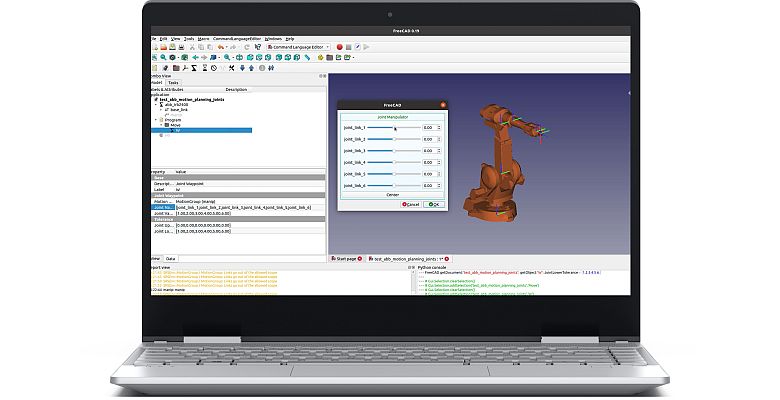
- Omgevingsmodellering. Gebruikers kunnen een CAD-model van hun robot maken of importeren, inclusief armaturen en gereedschappen aan het einde van de arm. Ze kunnen het robotmodel manipuleren en besturen met behulp van gewrichtsschuifregelaars en simuleer gereedschapsbewegingen met een intuïtieve 'dragger' om gewrichtsconfiguraties te evalueren en te berekenen.
- Robotmanipulatie en –planning. Engineers kunnen bewegingsplannen genereren met behulp van commerciële padplanners, aangepaste modellen voor toepassingsspecifiek gedrag creëren en botsingen voorspellen en vermijden.
- Aangepaste planningvolgorde. Gebruiker kunnen robotbewegingen definiëren met behulp van op coördinaten gebaseerde of gezamenlijke waypoints. Ze kunnen verschillende typen bewegingssegmenten en bewegingsgroepen specificeren terwijl ze aanvullende opdrachten invoegen.
Foto: Southwestern Research Institute