
24/08/2022
Door Ad Spijkers
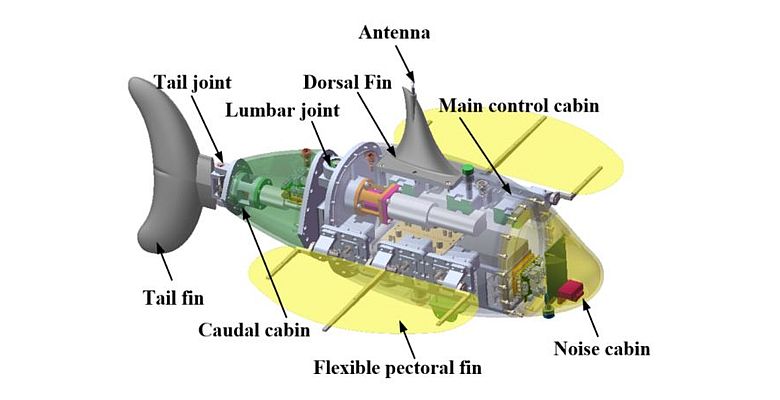
De RobDact is een bionisch onderwatervaartuig, geïnspireerd op de Dactylopteridae (vliegende poon) die bekend staat om zijn vergrote borstvinnen.
Onderwaterrobots worden gebruikt voor veel maritieme taken, zoals visserij, onderwaterverkenning en kartering. De meeste traditionele onderwaterrobots worden aangedreven door een schroef, wat effectief is om met een stabiele snelheid in open water te varen. Onderwaterrobots moeten echter vaak met lage snelheden in turbulente wateren kunnen bewegen of zweven, terwijl ze een specifieke taak uitvoeren.
Het is voor een schroef moeilijk om een robot in deze omstandigheden te verplaatsen. Een andere factor wanneer een onderwaterrobot met lage snelheden in onstabiel stromend water beweegt, is de 'trillende' beweging van de propeller. Dit trillen genereert onvoorspelbare vloeistofpulsen die de efficiëntie van de robot verminderen.
De afgelopen jaren hebben onderzoekers gewerkt aan het creëren van onderwaterrobots die levende wezens nabootsen. Deze bionische vaartuigen bewegen door het water, vergelijkbaar met de manier waarop vissen of manta's bewegen. Vergeleken met traditionele onderwatervoortstuwingsvaartuigen werken deze bionische onderwaterrobots efficiënter en robuuster in het water, terwijl ze milieuvriendelijk zijn.
Hydrodynamisch model
Onderwaterrobots worden beïnvloed door de omringende vloeistof terwijl ze door het water bewegen. Dit fenomeen wordt het hydrodynamisch effect genoemd. Tijdens het bewegen in het water heeft de robot te maken met onbekende waterstroming en kracht, wat kan leiden tot onnodige veranderingen in de positie van de robot.
Om de robot beter te kunnen besturen, hadden onderzoekers van het Beijing Institute of Technology een nauwkeuriger hydrodynamisch model nodig. Het maken van dit model is meestal erg complex en moeilijk. Bovendien is de echte onderwateromgeving veranderlijk en moeilijk te voorspellen, waardoor de modelparameters kunnen verschuiven bij een verandering in de omgeving.
Het team heeft computational fluid dynamics (CFD) gebruikt om hydrodynamische modellen voor onderwaterrobots te maken. Modellen die zijn gemaakt met alleen CFD zijn echter niet zo nauwkeurig en praktisch als ze zouden moeten zijn. Daarom probeerde het onderzoeksteam een andere aanpak. Om het hydrodynamische model nauwkeuriger en praktischer te maken, hebben de wetenschappers CFD gecombineerd met krachtmetingsexperiment.
Platform
Met behulp van CFD identificeerden de onderzoekers de parameters in het hydrodynamische model. Vervolgens ontwikkelden ze een krachtmeetplatform om de kracht te verkrijgen die door het RobDact-vaartuig wordt gegenereerd. Met dit proces konden ze zowel de storende kracht als de kracht die door de RobDact wordt gegenereerd in elke complexe omgeving verkrijgen. Dit kan helpen de bewegingstoestand van het onderwatervaartuig beter te begrijpen en het nauwkeuriger te besturen.
Met het experiment kon het team de hydrodynamische kracht van de RobDact bij verschillende snelheden bepalen. Met het krachtmeetplatform konden ze de kracht in de X-, Y- en Z-richting meten. Ze hebben een relatie vastgesteld tussen de RobDact-fluctuatieparameters en de stuwkracht van het vaartuig. Door het dynamische model van de robot samen te voegen met het model voor stuwkrachtmapping, konden de onderzoekers een nauwkeurig en praktisch hydrodynamisch model van de robot in verschillende bewegingen ontwikkelen.
Met het oog op de toekomst willen de onderzoekers de intelligente besturing van bionische onderwatervaartuigen bestuderen met behulp van het hydrodynamische model in combinatie met kunstmatige-intelligentiemethoden, zoals reinforcement learning. Het uiteindelijke doel is om de praktische toepassing van bionische onderwatervaartuigen te promoten bij het bewaken van wateromgevingen en het zoeken en redden onder water.
Foto: Rui Wang, Institute of Automation, Chinese Academy of Sciences