
15/02/2019
Door Ad Spijkers
Om robots in bedrijven en huishoudens als betrouwbare hulpmiddelen te kunnen gebruiken, moeten ze hun omgeving nauwkeuriger kunnen waarnemen en interpreteren dan tot op heden het geval is.
Aan de Universität Bayreuth ontwikkelt men nieuwe technieken op basis van een minimale rekencapaciteit. Zo leren robots in het project SeLaVi (ziet u de woordspeling?) om op basis van een paar karakteristieke beelden herkennen wat er in hun omgeving gebeurt.
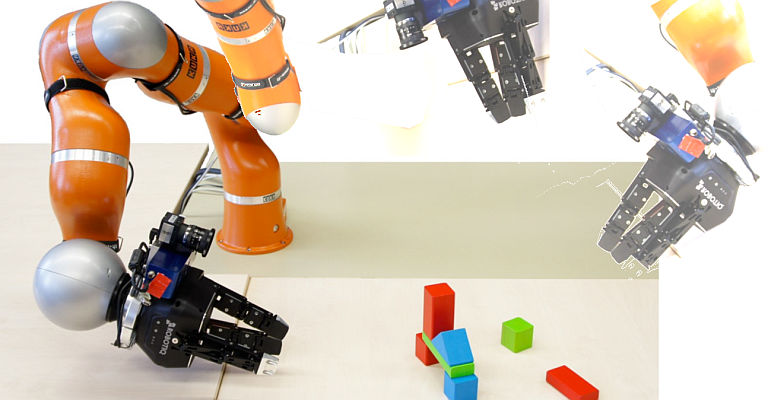
Camera's die als ogen aan de armen van de robot zijn bevestigd spelen daarbij een centrale rol. De camera's genereren beelden van de objecten in hun werkomgeving en die worden omgezet in geometrische modellen. Kenmerkend is dat de beelden uit een minimaal aantal representatieve oppervlakken bestaan (Boundary Representations of BReps). Hierdoor vereisen ze minder geheugen- en rekencapaciteit dan de puntenwolken of driehoeksnetwerken die tot nu toe worden gebruikt voor objectherkenning.
De modellen worden met extra, door de camerabeelden verkregen kleurinformatie gecombineerd en opgeslagen in een databank. Als de robots nieuwe camerabeelden vergelijken met de databank, kunnen ze objecten in hun omgeving foutvrij herkennen. Daarbij laten ze zich niet afleiden door bewegingen van naastliggende objecten.
Minimale rekenkracht
Dit vermogen van de robots vormt de basis voor verdere leerstappen die samenhangen met de contexten tussen de statische of bewegende objecten in hun werkomgeving. Robots moeten deze 'semantische relaties' leren begrijpen om vervolgens met hun armen op doelmatige wijze in de respectievelijke scenario's te kunnen werken. De vermogens die momenteel in Bayreuth worden ontwikkeld en geoptimaliseerd, kunnen op veel terreinen worden toegepast, vanaf autonome servicerobots tot en met de samenwerking tussen mensen en robots. Met hun onderzoek willen de wetenschappers er niet in de laatste plaats toe bijdragen dat geautomatiseerde dienstverlening de mensen ook in hun huishouden ontlast en de dagelijkse kwaliteit van leven verhoogt.
Het project SeLaVi sluit aan bij een verwant onderzoeksprogramma in Bayreuth. Hier worden objecten met behulp van in de hand gehouden dieptecamera's sensorisch vastgelegd en de gegenereerde beelden omgezet in CAD-modellen. Dit moet eveneens automatisch gebeuren zonder dat de gebruiker van de camera specialistische kennis nodig heeft. Om de noodzakelijke rekenkracht zo gering mogelijk te houden, wordt getest in hoeverre beelden met lage resoluties al voldoende zijn om aan de hand van de hieruit gegenereerde CAD-modellen objecten te kunnen identificeren.
Het doel is om met hardware met naar verhouding weinig rekenkracht ruimtelijke scenario's te interpreteren, waarin objecten met verschillende eigenschappen, vormen en functies zinvol bij elkaar worden gezien. De resultaten van dit onderzoekswerk zijn nuttig voor de verdere ontwikkeling van robots die betrouwbare diensten kunnen leveren zonder dat de gebruiker diepgaande kennis of grote rekencapaciteit nodig heeft. Wanneer de dieptecamera's worden vastgehouden door de arm van een robot kunnen ze functioneren als ogen, die een betrouwbare oriëntatie in diens werkomgeving mogelijk maken.
Fotomontage: Dorian Rohner