
21/10/2024
Door Ad Spijkers
Engineers aan de University of Pennsylvania hebben een algoritme ontwikkeld dat voorheen onmogelijke taken mogelijk maakt voor autonome robots.
De onderzoekers van de universiteit in Philadelphia hebben een nieuw algoritme ontwikkeld waarmee robots in real-time kunnen reageren op complex fysiek contact. Hierdoor kunnen autonome robots slagen in voorheen onmogelijke taken, zoals het besturen van de beweging van een glijdend object.
Nieuw algoritme
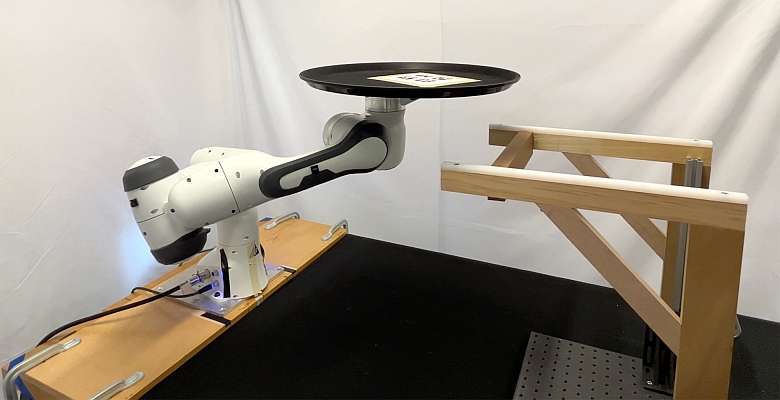
Het algoritme, bekend als consensus complementarity control (C3), kan een essentiële bouwsteen blijken te zijn voor toekomstige robots. Ze vertalen aanwijzingen uit de output van kunstmatige intelligentietools zoals grote taalmodellen of grote taalmodellen naar passende actie. Met het nieuwe algoritme kan de robotarm het kunststof dienblad van een ober in evenwicht houden en verplaatsen. Hierdoor wordt de controle over een glijdend object beheerst, een voorheen onmogelijke taak voor robots.
Een groot taalmodel zou bijvoorbeeld kunnen zeggen: "Ga een ui snijden". Maar hoe beweeg je de arm om de ui op zijn plaats te houden, het mes vast te houden en de ui op de juiste manier door te snijden, om hem indien nodig opnieuw te oriënteren?
Controle
Een van de grootste uitdagingen in robotica is controle, een verzamelnaam voor het intelligente gebruik van de actuatoren van de robot, de onderdelen van een robot die zijn ledematen bewegen of besturen, zoals motoren of hydraulische systemen. Controle over het fysieke contact dat een robot maakt met zijn omgeving is zowel moeilijk als essentieel. Dat soort redeneringen op lager en gemiddeld niveau zijn echt fundamenteel om iets in de fysieke wereld te laten werken.
Mensen hoeven zelden twee keer na te denken over hoe ze met objecten omgaan. De uitdaging voor robots is deels dat iets simpels als het oppakken van een kopje veel verschillende keuzes met zich meebrengt. Dat varieert van de juiste benaderingshoek tot de juiste hoeveelheid kracht. Niet elke keuze is zo veel anders dan de keuzes eromheen. Maar tot nu toe heeft geen enkel algoritme robots in staat gesteld om al die keuzes te beoordelen en in realtime een passende beslissing te nemen.
Hallucinatie
Om het probleem op te lossen, hebben de onderzoekers een manier bedacht om robots te helpen 'hallucineren' over de verschillende mogelijkheden die zich kunnen voordoen bij contact met een object. Door zich de voordelen van het aanraken van dingen voor te stellen, krijgt een ontwikkelaar gradiënten in zijn of haar algoritme die overeenkomen met die interactie. Daarna kan hij/zij een stijl van op gradiënten gebaseerd algoritme toepassen.
In het proces van het oplossen van dat probleem wordt de natuurkunde geleidelijk steeds nauwkeuriger in de loop van de tijd. De ontwikkelaar beeldt zich dan niet alleen maar in: "Wat gebeurt er als ik het aanraak?". Maar hij of zij is van plan om het daadwerkelijk aan te raken.
Foto: DAIR Lab