
10/06/2020
Door Ad Spijkers
Duitse en Amerikaanse onderzoekers hebben een zwemmend robotmodel ontwikkeld om de de morfologische intelligentie van vissen te bestuderen.
Wetenschappers van het Max Planck Institut für Intelligente Systeme in Tübingen die tot het onderzoeksconsortium Cyber Valley behoren, hebben samen met onderzoekers van de Harvard University in Cambridge (Massachusetts) een zwemmende zachte robot ontwikkeld en zijn golfachtige beweging in het water onderzocht.
Het zachte 'modeldier' is bedoeld om te helpen bij het bestuderen van het complexe bewegingsgedrag dat vaak in de natuur wordt waargenomen. Het onderzoeksteam haalt de ontwerpprincipes en bewegingsvaardigheid van de dieren eruit om betere robots te bouwen. Hiermee wil men waardevolle inzichten te verwerven in de morfologische intelligentie van de dieren.
Vis in het water
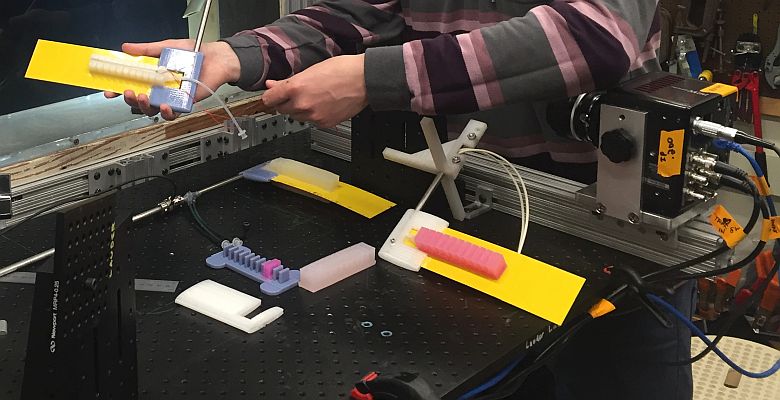
Wanneer een vis in water zwemt, vloeien elektrische golven in golven door zijn spieren. Het dier buigt van kop tot staart heen en weer en creëert zo voortstuwing. De wetenschappers onderzochten welke parameters zwembewegingen beïnvloeden: stijfheid en mobiliteit van het lichaam van de vis respectievelijk de bewegingssnelheid van rechts naar links. Bij levende vissen zijn dergelijke parameters moeilijk afzonderlijk te isoleren en te meten - daarom heeft het team een visrobot gebouwd.
De onderzoeksgroep ontwikkelde daarom een pneumatisch bediend, visachtig model van zachte siliconen. Men onderzocht hiermee welke stuwkrachten door verschillende parameters worden veroorzaakt en hoe ze elkaar beïnvloeden. Ze maten zowel de voorwaartse stuwkracht als de laterale krachten die tijdens het zwemmen werden gegenereerd en het koppel met behulp van een statistisch lineair model.
Ze ontdekten dat zowel de stijfheid als de frequentie de zwemkinematica significant beïnvloeden en dat er complexe interactieve effecten van deze twee parameters zijn op de stuwkracht. Hoe stijver de ruggengraat van de visachtige robot, hoe belangrijker een hogere oscillatiefrequentie is om stuwkracht te genereren.
Bij stijvere robotmodellen leidt een hogere frequentie tot hogere waarden, zowel in termen van stuwkracht als laterale krachten. Maar grote laterale krachten verminderden de zwemefficiëntie. De onderzoekers konden dit effect verzachten door kleine golfbewegingen. Door de bewegingen van de linker- en rechterlichamen goed te coördineren, verminderden ze de amplitudes van de laterale krachten.
Doelstelling
Prioriteit in de onderzoekssamenwerking is het bewegingsapparaat bij dieren te begrijpen. Terwijl ze de manoeuvres en strategieën observeren die dieren gebruiken, is hun doel om de geprogrammeerde morfologische intelligentie te decoderen om het robotontwerp te verbeteren. Door robotica geïnspireerde biologie kan helpen de bewegingen die in natuurlijke systemen worden waargenomen beter te begrijpen en conclusies te trekken waarom de biologie een bepaald ontwerp heeft voortgebracht.
Het is een leercyclus waarin biologie helpt om de voortbeweging van de robot te verbeteren en de robot geeft inzicht in biologie die anders niet mogelijk zou zijn. Uiteindelijk krijgen onderzoekers een dieper begrip van beide.
Op de site van CyberValley vindt u een (heel) korte video van de zwemrobot.