
09/06/2023
Door Ad Spijkers
In een nieuw project moeten robotsystemen met kunstmatige intelligentie zelfstandig munitie onder water kunnen detecteren en gereedmaken voor verwijdering.
Op de bodem van de Noordzee en de Oostzee is tijdens en na de twee wereldoorlogen meer dan een miljoen ton oude munitie gedumpt vormt. Deze vormen een bedreiging voor mens en milieu. Tot nu toe is de munitie geborgen door getrainde duikers. In de toekomst zullen robots deze uitdagende en potentieel gevaarlijke taak overnemen. De daarvoor benodigde technologieën worden ontwikkeld door het Robotics Innovation Centre van het Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) in Bremen. In het CleanSeas-project moeten robotsystemen dankzij kunstmatige intelligentie zelfstandig munitie onder water kunnen detecteren en gereedmaken voor verwijdering.
Gevaar
Volgens het Umweltbundesamt in Dessau-Roßlau (tussen Leipzig en Berlijn) ligt er in de Noord-Europese wateren meer dan 1,6 miljoen ton verontreinigde munitie opgeslagen. Deze roesten, geven gifstoffen vrij in het milieu en vormen het risico van ongecontroleerde ontploffing. Behalve gevaren voor mens en milieu heeft dit ook economische gevolgen. Het treft sectoren als visserij, scheepvaart en toerisme en belemmert de bouw van offshore-installaties of het leggen van onderzeese kabels. Het bergen van de munitie door duikers, soms voorafgegaan door een gecontroleerde sloop, is kostbaar en riskant.
In de toekomst zullen robots het opruimen van verontreinigde terreinen overnemen. Hierdoor kunnen gevaren worden geminimaliseerd en tegelijkertijd kon de efficiëntie van de explosievenopruiming verhoogd. De systemen zijn echter nog niet in staat om zo'n veeleisende taak alleen aan te kunnen.
AI voor onderwaterrobots
Het doel van het CleanSeas project is, de technologische basis te creëren waardoor robots autonoom kritieke infrastructuur onder water kunnen vastleggen en hanteren. Hiertoe ontwikkelt het Robotics Innovation Center AI-oplossingen voor de nauwkeurige navigatie in de buurt van kritieke objecten, 3D-reconstructie van objecten met verschillende sensoren en besturing van het hele lichaam voor de (gedeeltelijk) autonome objectmanipulatie.
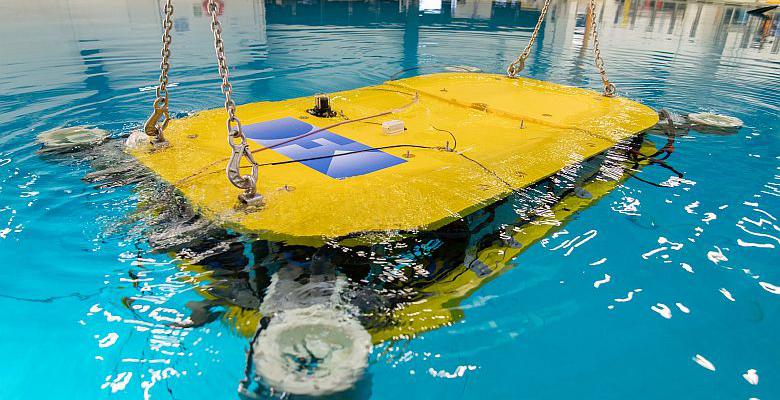
Het autonome onderwatervoertuig Cuttlefish (foto), ontwikkeld bij DFKI, dient als robotachtig testplatform. De robot heeft twee diepzee grijpsystemen voor het flexibel hanteren van objecten onder water. Dankzij het speciale ontwerp en de op AI gebaseerde besturing en regeling kan het tijdens een duik zijn zwaartepunt en drijfvermogen veranderen en elke oriëntatie aannemen.
Omgevingsbewustzijn
De ondewaterrobot moet zijn doel kunnen naderen zonder ermee te botsen. Hiervoor is het voertuig uitgerust met een groot aantal sensoren zoals sonars, camera's, laserscanners en magnetometers. Door de sterk variërende omgevingsomstandigheden onder water kan de robot zijn omgeving echter slechts gedeeltelijk en met een lage resolutie vastleggen. Dit maakt niet alleen de navigatie moeilijker, maar ook de objectdetectie.
Om deze reden combineren de wetenschappers akoestische en optische sensorgegevens met behulp van op waarschijnlijkheid gebaseerde sensorfusie. De kwaliteit van de cameragegevens met hoge resolutie is sterk afhankelijk van de heersende licht- en zichtomstandigheden. Akoestische sensoren zijn daarentegen onafhankelijk van de visuele omstandigheden, maar leveren alleen gegevens met een aanzienlijk lagere resolutie. Bovendien is hun functionaliteit op korte afstand ernstig beperkt.
Om de hiaten in objectdetectie te dichten, vertrouwen de onderzoekers op het gebruik van generatieve AI-algoritmen. Een neuraal netwerk is zo getraind dat het camera-achtige beelden kan genereren uit sonardata met een lage resolutie. Op deze manier is een uitgebreide reconstructie van het doelobject in 3D mogelijk.
Lichaamsbeheersing
Een moeilijkheid ligt in het besturen van de robot, waarvan de structuur verandert wanneer de grijpsystemen worden uitgeschoven. Klassieke methoden zijn niet geschikt voor robotmanipulatie onder water. Om nauwkeurige armbewegingen mogelijk te maken, moet het hele voertuig inclusief de armen in de besturing worden opgenomen. Om dit te doen, gebruiken de wetenschappers moderne benaderingen van regulering van het hele lichaam, die ze combineren met aangeleerd gedrag.
Een algoritme op basis van diepe neurale netwerken leert hoe het voertuig zich onder verschillende omstandigheden gedraagt. Dankzij het aangeleerde hydrodynamische model kan de onderwaterrobot zijn houding tijdens bedrijf automatisch en nauwkeurig aanpassen. Om armbotsingen te voorkomen, ontwikkelen de onderzoekers software die armbewegingen in real-time coördineert. Tactiele krachtsensoren op de robotgrijpers maken een gevoelige en, in geval van twijfel, flexibele behandeling van munitieresten mogelijk.
Evaluatie
Het doel van de manipulatie is om stroppen aan de granaten van oud oorlogsmaterieel te bevestigen om deze te kunnen optillen en transporteren. Hiervoor onderzoeken de wetenschappers verschillende concepten, die ze vervolgens omzetten in bijbehorend robotgedrag, zoals het bevestigen van hijsmiddelen aan bestaande hijsogen, het lussen en spannen van de munitie met riemen of het vangen met netten.
De ontwikkelde technologieën dienen eerst getest te worden onder controleerbare laboratoriumomstandigheden. De onderzoekers kunnen bij DFKI in Bremen oude munitie in het 3.400 m3 en 8 m diepe zoutwaterbassin dumpen en in de daarin geplaatste zandbakken plaatsen.
De robotoplossingen die in CleanSeas worden overwogen, kunnen een belangrijk hulpmiddel zijn om het munitieprobleem in de wereldzeeën te overwinnen. Ze kunnen ook de uitbreiding van hernieuwbare energiebronnen en het duurzame gebruik van maritieme hulpbronnen bevorderen. De nieuwe technologieën kunnen ook worden gebruikt voor robots die autonoom onderhouds- en inspectiewerkzaamheden uitvoeren aan offshore windparken en aan terminals voor de productie van groene waterstof of aquacultuur.
Foto: Thomas Frank, DFKI