
19/12/2022
Door Ad Spijkers
Onderzoekers van het Istituto Italiano di Tecnologia hebben een prototype van een robotplatform voor ruimtetoepassingen gerealiseerd.
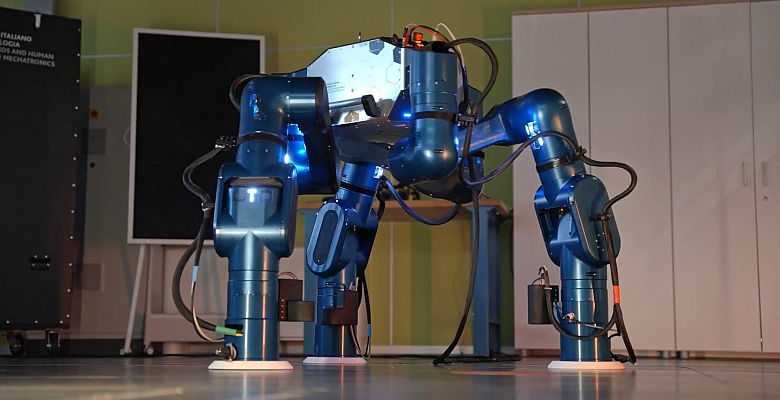
De onderzoekers van het IIT in Genua hebben de nieuwe robot MARM gedoopt. De robot heeft drie ledematen die kunnen worden gebruikt om te lopen en laadmodules vast te pakken, te verplaatsen en te vervoeren. De robot is bedoeld om astronauten te helpen bij het samenstellen en onderhouden van infrastructuren in de ruimte of, in de toekomst, op andere planeten. Het prototype zal worden getest in een fysieke simulatoropstelling voorafgaand aan de ontwikkeling van een voor de ruimte gekwalificeerde versie.
Robots in space
Robottoepassingen voor ruimteverkenning bieden unieke omgevingen, voorwaarden en kansen voor de ontwikkeling van nieuwe platforms. De technologieën die nodig zijn voor robotbesturing, voortbeweging en manipulatie op aarde zijn behoorlijk geavanceerd. Maar de omstandigheden van de orbitale omgeving, zoals de microzwaartekracht, vormen nieuwe uitdagingen voor de robotica onderzoeksgemeenschap.
Het ontwikkelen van tools om astronauten te helpen bij het installeren, inspecteren, onderhouden en repareren van ruimte-infrastructuren is het doel van het Mirror-project (Multi-arm Installation Robot for Readying ORUs and Reflectors), dat wordt gefinancierd door de European Space Agency (ESA) Het MARM-platform (Multi-Arm Relocatable Manipulator) wordt binnen dit kader gerealiseerd.
Opbouw
Het MARM-robotplatform bestaat uit een centraal lichaam, drie ledematen en een docking-apparaat (handig voor zowel het voeden als het verzenden/ontvangen van gegevens). Het werd gebouwd volgens een door computers ondersteunde ontwerpbenadering, waarbij de robotprestaties met betrekking tot mobiliteit en flexibiliteit werden overwogen en geoptimaliseerd. In feite werden de kinematica en de transport-/operationele capaciteit getest, zowel met als zonder zwaartekracht. Hierbij werd rekening gehouden met verschillende kinematische modellen, die verschilden in de lengte en conformatie van ledematen, schakels en gewrichten.
Het MARM-platform kan zijn drie ledematen gebruiken om zich te verplaatsen, de standaardverbindingen op de oppervlakken van het station vast te pakken en eroverheen te kruipen. Ook kan hij om componenten assembleren en positioneren – met name modulaire zeshoekige tegels van 1,2 m breed en 0,2 m dik, met een gewicht van ongeveer 12 kg. Ook kan hij de zogeheten Orbital Replacement Units (ORU's) manipuleren.
De drie ledematen van MARM zijn verbonden met de centrale basis. Ze vormen het belangrijkste verschil met eerder ontwikkelde technologieën. De ledematen geven de robot meer bewegings- en manipulatieflexibiliteit en tegelijkertijd een breder manipulatiebereik, waardoor het grote ladingen kan vervoeren en monteren en installeren, zelfs in bi-manuele modus.
Werking
De robot kan dankzij de opstelling met drie ledematen bewegingen van het hele lichaam uitvoeren. Eenmaal in positie kunnen de ledematen die voor verankering worden gebruikt de montage vergemakkelijken door de centrale MARM-bekkenbasis aan te passen. Hierdoor worden de krachten die worden overgebracht op het frame van het station verminderd . Dit is een van de belangrijkste voordelen van het hebben van meerdere ledematen in plaats van hetzelfde ledemaat te gebruiken voor kruipen en monteren.
Volgens het beoogde scenario zal het MARM-platform, door middel van zijn elektromechanische en besturingscomponenten en dankzij een perceptiesysteem en de continue uitwisseling van inputs/outputs, in staat zijn om een lading op te halen uit een opslagplaats, zichzelf te verplaatsen terwijl hij deze draagt op de gewenste locatie te monteren.
Het prototype van het MARM-platform zal worden gebruikt om het bovenstaande scenario te evalueren in een fysieke simulatoropstelling om de haalbaarheid van een dergelijke oplossing te beoordelen voorafgaand aan de ontwikkeling van de ruimtegekwalificeerde versie.
Foto: screenshot video IIT