
10/04/2024
Door Ad Spijkers
Duitse onderzoekers hebben een mobiele sensor ontwikkeld voor 3D-metingen met hoge resolutie.
Onderzoekers van het Fraunhofer-Institut für Angewandte Optik und Feinmechanik (IOF) in Jena hebben met hun GoScout3D handscanner een mobiele sensor ontwikkeld die 3D-metingen met hoge resolutie van complexe objecten mogelijk maakt. Om dit proces nog verder te automatiseren, hebben de onderzoekers de scanner nu succesvol gekoppeld aan een robothond van Boston Dynamics. Op deze manier kunnen in de toekomst metingen in bijvoorbeeld de kwaliteitsborging efficiënter verlopen en worden medewerkers ontlast.
'Zit', 'wacht' of 'los' zijn commando’s die iedere hondeneigenaar kent. In productiebedrijven en installaties komen we de dieren in het algemeen niet tegen. Maar als de onderzoekers in Jena hun zin krijgen, komt u in de toekomst misschien wel een viervoeter tegen. Deze werkt volgens strikte menselijke instructies en maakt het dagelijkse werk voor zijn baas gemakkelijker. Alleen hebben de commando's nu vooral betrekking op maatregelen voor uiterst nauwkeurige 3D-documentatie.
Geautomatiseerde 3D-digitalisering
Virtuele 3D-modellen maken de nauwkeurige documentatie van grote machines en hun kleine details mogelijk. Voor dit doel ontwikkelden onderzoekers van Fraunhofer IOF de mobiele handscanner GoScout3D. Het instrument maakt 2D- en 3D-digitalisering mogelijk van complexe objecten met een volume van enkele kubieke meters. Bijzonder is de hoge ruimtelijke resolutie beter dan 0,25 mm.
Om deze digital twins te creëren, moest de scanner tot nu toe door mensenhanden rond het te meten object worden bewogen. Dit vereiste grote precisie bij het uitvoeren van de meting, een constante snelheid bij het geleiden van de sensorkop en een grotendeels constante naleving van een gespecificeerde meetafstand. Dit resulteerde in potentiële tekenen van vermoeidheid of onvolledigheid van de meetgegevens.
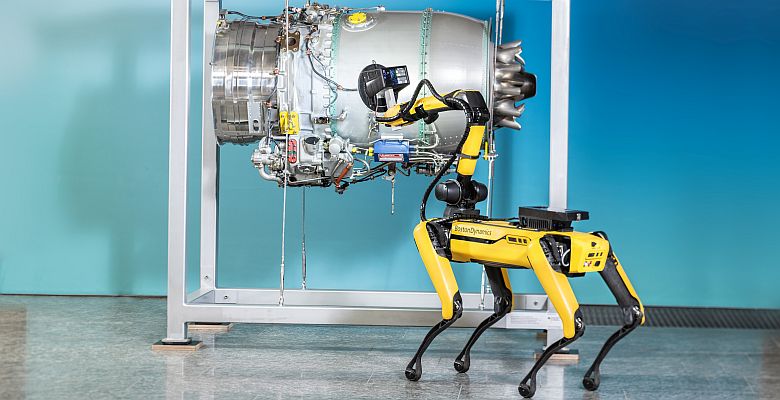
De onderzoekers in Jena zochten naar een manier om metingen in de toekomst comfortabeler voor mensen en tegelijkertijd efficiënter voor het operationele proces te maken. Ze combineerden de 3D-scanner met Spot, met de robothond van Boston Dynamics. Door de sensorkop te integreren met de robot kan het meetproces van de GoScout3D-scanner in de toekomst worden geautomatiseerd en mogelijk zijn zonder de constante behoefte aan menselijk toezicht.
Wendbaar en flexibel
Conventionele meetrobots worden bijvoorbeeld langs productielijnen gebruikt en zijn daar meestal permanent geïnstalleerd. De robothond kan GoScout3D autonoom door de meetopstelling manoeuvreren, met behoud van dezelfde meetsnelheid en afstand. De robot heeft als voordeel dat hij zich vrij in de ruimte en op verschillende soorten oppervlakken kan bewegen. Het te meten meetobject kan worden verplaatst en kan aan alle kanten en op verschillende niveaus volledig worden geregistreerd.
Een consistente scansnelheid en minder fluctuaties in de bediening zorgen voor een grotere reproduceerbaarheid van de resultaten en verkorten de meettijd door minder dubbele metingen. Dit maakt de geïntegreerde meetunit interessant voor gebruik in seriematige productieprocessen of kwaliteitscontrole.
Autonome meting
Om deze toepassingsdoelen te kunnen bereiken, is een betrouwbare coördinatie tussen robot en 3D-sensor vereist. Hiertoe wordt de sensor via een hand-oogkalibratie aan het coördinatensysteem van de robot gekoppeld. Nadat de looprobot op deze manier met de scanner is gekalibreerd, kan deze door menselijke experts worden geprogrammeerd om vooraf gedefinieerde objecten te meten. Vóór het daadwerkelijke meetproces worden de snelheid, exacte meetlocaties en andere belangrijke parameters door een mens naar Spot verzonden. De robothond kan vervolgens scans kan uitvoeren zonder dat de persoon fysiek aanwezig hoeft te zijn.
Op deze manier zou Spot in de toekomst routinematige metingen kunnen overnemen. De menselijke experts kunnen zich in plaats daarvan concentreren op kritische aspecten van het controleren, analyseren en evalueren van de 2D- en 3D-data die zijn gemaakt met GoScout3D. Ook moet de koppeling van de scanner met een wendbare robot methoden voor bediening en bewaking op afstand mogelijk maken.
De onderzoekers van Fraunhofer IOF ontwikkelden de 3D-handscanner GoScout3D in samenwerking met MTU Maintenance in Langenhagen (bij Hannover). Om complexe 3D-modellen te maken, worden tweedimensionale kleurenbeelden van het te meten object opgenomen. Dit gebeurd met een 20 megapixel kleurencamera met behulp van de sensorkop met een massa van slechts 1,3 kg. Hieruit worden met behulp van fotogrammetrie de 3D-gegevens van de gehele opstelling berekend.
Foto: Fraunhofer IOF