
12/09/2023
Door Ad Spijkers
De University of Houston werkt aan een autonome robot voor inspectie van onderzeese olie- en gaspijpleidingen.
Als gevolg van beschadigde pijpleidingen neemt het aantal ernstige ongelukken in de mondiale olie- en gasindustrie toe. Daarom ontwikkelen onderzoekers van de University of Houston een autonome robot om potentiële pijpleidinglekken en structurele storingen tijdens onderzeese inspecties te identificeren. De technologie zal het inspectieproces veiliger en economischer maken, terwijl ook onderzeese omgevingen tegen rampen worden beschermd.
Lekkages
Jaarlijks vinden in de Amerikaanse wateren duizenden olielekkages plaats. De meeste zijn klein, maar gelekte ruwe olie kan schade veroorzaken aan gevoelige gebieden zoals stranden, mangroven en wetlands. Wanneer grotere lekkages plaatsvinden, zijn pijpleidingen vaak de boosdoener. Volgens het Bureau of Ocean Energy Management in Washington zijn er tussen 1964 en 2015 in totaal 514 olielekkages in verband met offshore-pijpleidingen geregistreerd. Bij twintig lekkages was sprake van volumes van meer dan duizend vaten.
Tijdige inspectie van onderzeese infrastructuur, met name pijpleidingen en offshore-putten, is de sleutel tot het voorkomen van dergelijke rampen. De huidige inspectietechnieken vereisen echter vaak een goed opgeleide menselijke duiker en kosten aanzienlijk tijd en geld. De uitdagingen worden nog groter als het inspectiedoel zich diep onder water bevindt.
SmartTouch
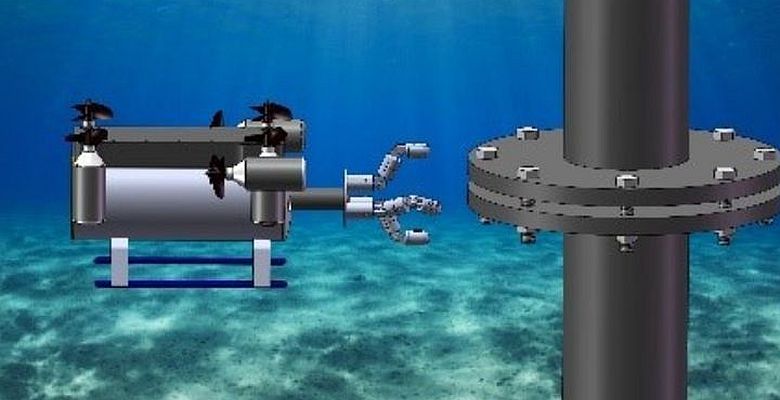
De SmartTouch-technologie die nu bij de universiteit wordt ontwikkeld, is gebaseerd op op afstand bestuurbare voertuigen (ROV's). Deze zijn voorzien van meerdere op stressgolven gebaseerde slimme aanraaksensoren, videocamera's en scanning-sonars. Ze kunnen langs een onderzeese pijpleiding zwemmen om flensbouten te inspecteren. Boutverbindingen hebben volgens het Bureau of Safety and Environmental Enforcement (BSEE) in Washington de snelheid van pijplijnongevallen die tot lekkage leiden, versneld. Het bureau financiert het project met een subsidie van bijna een miljoen dollar.
Door het inspectieproces te automatiseren met deze geavanceerde robottechnologie kunnen exploitanten de kosten en het risico van deze belangrijke onderzeese inspecties dramatisch verlagen. Dit zal leiden tot veiligere operaties van offshore olie- en gaspijpleidingen omdat er minder tussenkomst van menselijke duikers nodig zal zijn. Een prototype van de ROV is al getest in het laboratorium en in Galveston Bay. De experimenten hebben de haalbaarheid aangetoond van de voorgestelde aanpak voor het inspecteren van het los raken van onderzeese boutverbindingen.
Faaloorzaken
Olie- en gaspijpleidingen falen om verschillende redenen. Defecten aan apparatuur, corrosie, weersomstandigheden en andere natuurlijke oorzaken en scheepsongevallen zijn verantwoordelijk voor de meeste grote lekken. Giftige en bijtende vloeistoffen die uit een beschadigde leiding lekken, kunnen tot verwoestende milieuvervuiling leiden.
Corrosie is verantwoordelijk voor de meeste kleine lekkages, maar de gevolgen voor het milieu kunnen nog steeds groot zijn. Daarom zal deze technologie corrosie nauwkeurig kunnen bewaken en zal het ook helpen de kans op pijpleidingfalen door andere factoren te verkleinen. De ontwikkelaars hebben eerder onderzoek gedaan naar piëzo-elektrisch gebaseerde structurele gezondheidbewaking. Eerdere onderzoeksinspanningen omvatten talrijke toepassingen voor schadedetectie, zoals scheurdetectie, hydratatiebewaking, onthechting en andere structurele afwijkingen.
Vooruitzichten
De onderzoekers in Houston werken samen met Oceaneering International, een eveneens in Houston gevestigde specialist in ROV-ontwikkeling, niet-destructieve testen en inspecties, engineering en projectmanagement, en landmeetkundige en karteringsdiensten. Olie- en gasexploitant Chevron zal de toekomstige commercialisering van de technologie evalueren.
De SmartTouch-detectieoplossing zal volgens de onderzoekers de deuren openen voor inspectie van andere soorten onderzeese constructies, door een ontwerpsjabloon te vormen voor toekomstige robottechnologieën. Uiteindelijk moet het project de grenzen verleggen van wat kan worden bereikt door het integreren van robotica en structurele technologieën voor conditiebewaking. Met de juiste implementatie zal het aantal onderzeese pijpleidingstoringen en de daarmee samenhangende ongevallen afnemen, en zullen onderzeese activiteiten zich sneller kunnen uitbreiden dan voorheen.
Foto: University of Houston