
17/03/2023
Door Ad Spijkers
Het Europese Sharework project verhoogt de procesproductiviteit en verbetert de ergonomie van de werkstations waar het wordt geïmplementeerd.
Industriële productieprocessen moeten efficiënt, flexibel en veilig voor werknemers zijn. Wanneer mensen en robots samenwerken aan complexe taken, is het belangrijk om conflicterende doelen tussen deze vereisten te voorkomen. In het EU-project Sharework ontwikkelde een team van het Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik (IWU) in Chemnitz hiervoor een snelheidsregelaar en voegde een multimodaal, omvangrijk waarnemingssysteem toe.
Om veiligheidsredenen moeten de robotbewegingen nog steeds worden vertraagd wanneer mensen naderen, maar aanzienlijk minder dan voorheen. Hierdoor zijn ongeveer 25% snellere robotbewegingen mogelijk, een aanzienlijke efficiëntiewinst.
Lidar
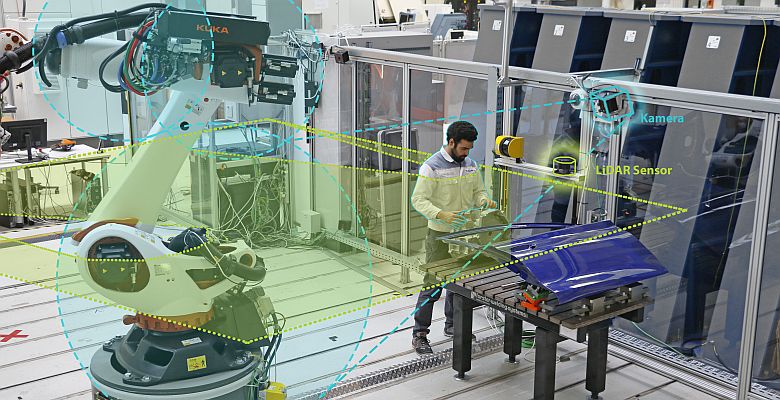
De centrale vraag voor de onderzoekers in een aanvraag bij Seat was: hoe kan een robot dankzij 'extra ogen' zijn omgeving beter inschatten en zo meer snelheid op zijn pad houden? Om dit te doen, reorganiseerde het team de waarnemingsgebieden in slimme zones. Bij snellere bewegingen wordt zo'n zone groter om het risico van een botsing met mensen uit te sluiten. Om de omgeving te detecteren, worden Lidar-sensoren (Light Detection and Ranging) als camera's gebruikt. Deze gebruiken gepulseerd laserlicht om objecten te detecteren en te categoriseren,.
Door de combinatie van reactietijden (Lidar: 50 ms, camera: 10 ms) en bewakingsgebieden (Lidar: grotere gebieden; camera: nearfield) kan de robot nu sneller bewegen. De exacte factor waarmee de procestijden kunnen worden verkort, is afhankelijk van de activiteit en de hardware die wordt gebruikt voor robotica en LiDAR-sensoren. Instelmogelijkheden voor bewegingssnelheid en acceleratie verhogen de acceptatie bij medewerkers.
Onderdeel van het softwarepakket is ook een module voor het beoordelen van alle beveiligingsaspecten. Hiermee kan in een vroeg stadium van de systeemplanning rekening worden gehouden, technisch worden gedocumenteerd en digitaal worden gecertificeerd. Dit betekent dat alle relevante gegevens voor latere wijzigingen beschikbaar zijn in het digitale beeld (tweeling) van het systeem.
Sharework
De onderzoeksresultaten maken deel uit van het EU-project Sharework. Daarin ontwikkelde een Europees consortium van zes onderzoeksinstellingen, dertien bedrijven en een normalisatie-instelling nieuwe oplossingen voor mens-robot-samenwerking. De verschillende software- en hardwaremodules maken het mogelijk om met name zware robots (industriële robots) met mensen te laten communiceren zonder dat fysieke beschermende barrières zoals hekken nodig zijn.
Het doel was om bestaande barrières in de samenwerking tussen mens en robot te overwinnen in de zin van effectievere samenwerking - zonder concessies te doen aan de veiligheid. De focus van het werk voor de Fraunhofer IWU lag op overkoepelende veiligheidsaspecten (Global Safety System).
Het resultaat is een modulair systeem dat de omgeving van een robot en menselijke acties kan begrijpen door middel van kennis en sensoren, voorspellingen van toekomstige toestanden, intelligent computing, augmented reality en gebaren- en spraakherkenningstechnologie. De ontwikkelde modules zijn al getest in de automobiel-, spoorweg-, metaal- en kapitaalgoederenindustrie. Toepassing in andere industriële montage- en productieprocessen is echter ook denkbaar om de efficiëntie van productieprocessen te verbeteren.
Foto: Fraunhofer IWU