
12/09/2023
Door Ad Spijkers
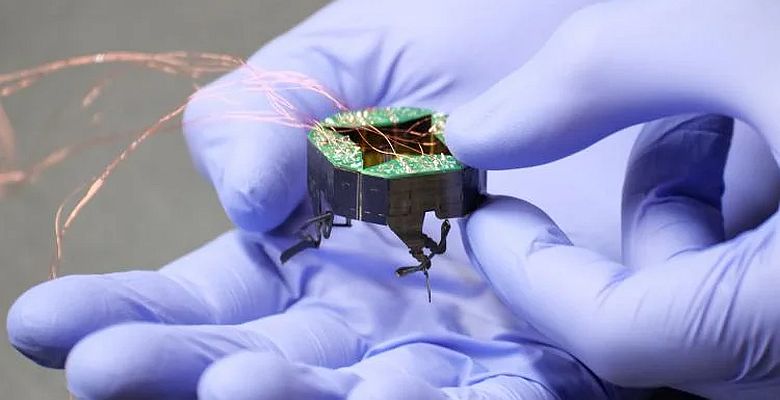
Clari is een kleine robot die passief van vorm kan veranderen om zich door nauwe openingen te wringen.
Clari staat voor Compliant Legged Articulated Robotic Insect. Het op insecten geïnspireerde apparaatje is ontwikkeld door een team ingenieurs aan de University of Colorado in Boulder (bij Denver). Het robotje heeft het potentieel om eerstehulpverleners na grote rampen op een geheel nieuwe manier te helpen. Verschillende van deze robots passen gemakkelijk in de palm van een hand en wegen allemaal minder dan een pingpongbal.
Clari kan zijn vorm transformeren van vierkant naar lang en slank als de omgeving krap wordt. Op dit moment heeft het robotje vier poten. Maar dankzij een modulair ontwerp kunnen de ontwikkelaars het eenvoudig aanpassen en meer poten toevoegen. Uiteindelijk willen ze een achtpotige, spinachtige robot bouwen die over een web kan lopen.
Ontwerp
Clari staat nog in de kinderschoenen. De robot is bijvoorbeeld nog vastgebonden aan draden die hem van stroom voorzien en basiscommando's sturen. Maar de bedoeling is dat de kleine machines op een dag zelfstandig in ruimtes kunnen kruipen waar nooit eerder een robot heeft gekropen, zoals de binnenkant van straalmotoren of het puin van ingestorte gebouwen. De meeste robots zien er uit als een kubus. Maar waarom zouden ze allemaal hetzelfde zijn? Dieren zijn er ook in alle soorten en maten.
De ontwikkelaars zijn geen onbekenden op het gebied van robots die een mengelmoes van de dierenwereld weerspiegelen. Een van hen ontwierp een robot die zich door nauwe ruimtes kon wringen door zich tot ongeveer de helft van zijn hoogte samen te drukken. Net zoals kakkerlakken kon deze zich een weg banen door scheuren in een muur. Maar die machine vertegenwoordigde slechts het topje van de ijsberg als het om de flexibiliteit van dieren gaat. Deze robot kon zich door verticale gaten wurmen, en dat is een manier om zich samen te drukkken. Maar wat zijn andere manieren? Hier komt Clari in beeld, gemaakt om zich door horizontale gaten te wringen.
Vorm
In zijn meest basale vorm heeft de robot de vorm van een vierkant met één poot langs elk van de vier zijden. Afhankelijk van hoe de situatie kan Clari breder worden, zoals een krab, of langwerpiger, zoals een kakkerlak. In totaal kan de robot veranderen van ongeveer 34 mm breed in zijn vierkante vorm tot ongeveer 21 mm breed in zijn langwerpige vorm.
Elk been van Clari fungeert bijna als een onafhankelijke robot. Elk been heeft een eigen printplaat en dubbele actuatoren die het been naar voren, naar achteren en van links naar rechts bewegen, vergelijkbaar met een menselijk heupgewricht. Theoretisch zou die modulariteit ervoor kunnen zorgen dat Clari-robots een grote verscheidenheid aan vormen kunnen aannemen.
De ontwikkelars willen robots voor algemeen gebruik die van vorm kunnen veranderen en zich kunnen aanpassen, ongeacht de omgevingsomstandigheden. In de dierenwereld zou dat zoiets als een amoebe kunnen zijn, die geen goed gedefinieerde vorm heeft, maar kan veranderen afhankelijk van of hij snel moet bewegen of wat voedsel moet opslokken.
Verdere ontwikkeling
De ontwikkelaars zien hun huidige ontwerp dan ook als het eerste in een reeks Clari-robots waarvan ze hopen dat ze kleiner en wendbaarder zullen worden. In toekomstige iteraties willen ze sensoren in Clari opnemen, zodat het robotje obstakels kan detecteren en er op kan reageren. Ze onderzoeken ook hoe ze de robot de juiste mix van flexibiliteit en kracht kunnen geven. Deze taak zal moeilijker worden naarmate het team meer benen toevoegt.
Uiteindelijk wil het team van vorm veranderende robots ontwikkelen die niet alleen door een laboratoriumomgeving bewegen, maar door een complexe, natuurlijke ruimte. Hierin kunnen de machines tegen obstakels zoals bomen of zelfs grassprietjes stuiten of moeten ze zich door scheuren en tussen de rotsen wringen en blijven doorgaan.
De wetenschappelijke publicatie vindt u hier.
Foto: Casey Cass, University of Colorado Boulder