
06/03/2023
Door Ad Spijkers
Onderzoekers aan de University of Illinois hebben een fysiologisch nauwkeurig model van octopus-armspieren ontwikkeld.
Octopusarmen coördineren bijna oneindige vrijheidsgraden om complexe bewegingen uit te voeren, zoals reiken, grijpen, apporteren, kruipen en zwemmen. Hoe deze dieren zo'n breed scala aan activiteiten bereiken, blijft een bron van mysterie, verbazing en inspiratie. Een deel van de uitdaging komt van de ingewikkelde organisatie en biomechanica van de interne spieren.
Het probleem werd aangepakt aan de University of Illinois Urbana-Champaign (220 km zuidelijk van Chicago). Onderzoekers aldaar hebben een fysiologisch nauwkeurig model van octopus-armspieren ontwikkeld. Het model geeft niet alleen inzicht in het biologische probleem, maar biedt ook een raamwerk voor het ontwerp en de besturing van toekomstige zachte robots.
Inspiratie
De indrukwekkende mogelijkheden van octopusarmen hebben lange tijd als inspiratie gediend voor het ontwerp en de besturing van zachte robots. Dergelijke robots hebben het potentieel om complexe taken uit te voeren in ongestructureerde omgevingen terwijl ze veilig in de buurt van mensen opereren, met toepassingen variërend van landbouw tot chirurgie.
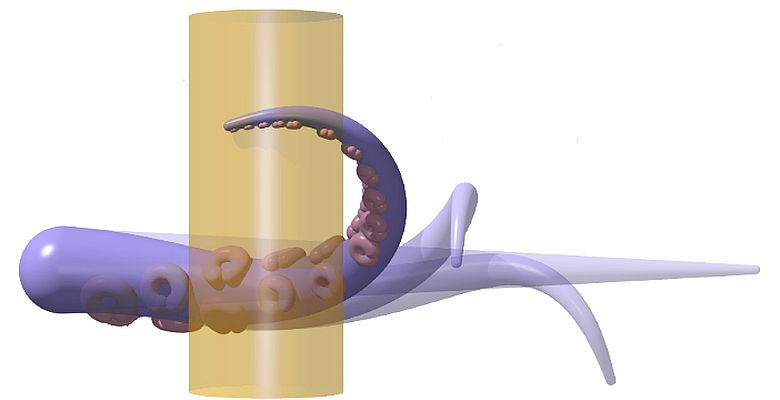
Maar zachte systemen zoals de armen van octopussen vormen een grote uitdaging voor modellering en besturing. Ze worden aangedreven door drie grote interne spiergroepen – longitudinaal, dwars en schuin – die er voor zorgen dat de arm op verschillende manieren vervormt: scheren, strekken, buigen en draaien. Dit geeft de zacht gespierde armen aanzienlijke vrijheid, in tegenstelling tot stijve tegenhangers.
Energiefunctie
Het belangrijkste inzicht van het team was om de armmusculatuur uit te drukken met behulp van een opgeslagen energiefunctie, een concept ontleend aan de theorie van de continuümmechanica. De arm rust op het minimum van een energielandschap. Spierbewegingen wijzigen de functie van opgeslagen energie, waardoor de evenwichtspositie van de arm wordt verschoven en de beweging wordt geleid.
Het interpreteren van de spieren met behulp van opgeslagen energie vereenvoudigt het besturingsontwerp van de arm aanzienlijk. In het bijzonder schetst de studie een energievormende besturingsmethodologie om de noodzakelijke spieractivaties te berekenen voor het oplossen van manipulatietaken zoals reiken en grijpen. Toen deze aanpak numeriek werd gedemonstreerd in de softwareomgeving Elastica, leidde dit model tot opmerkelijk levensechte bewegingen toen een octopusarm in drie dimensies werd gesimuleerd. Bovendien biedt het werk wiskundige prestatiegaranties die vaak ontbreken in alternatieve benaderingen waaronder machine learning.
Ecosysteem
Het onderzoek maakt deel uit van een groter ecosysteem van lopende samenwerkingen aan University of Illinois. Bovenstrooms zijn er biologen die experimenten doen met octopussen. Stroomafwaarts zijn er robotici die deze wiskundige ideeën gebruiken en toepassen op zachte robots.
De onderzoeksgroepen werken samen om de geobserveerde octopusfysiologie op te nemen in hun wiskundige model voor de studie. Toekomstig werk zal de biologische implicaties van op energie gebaseerde besturing bespreken. Bovendien willen de onderzoekers hun wiskundige ideeën opnemen in het ontwerp en de besturing van zachte robots. Dit zal niet alleen een systematische manier creëren om zachte robots te besturen, maar zal ook een dieper inzicht geven in hun werkingsmechanismen.
De wetenschappelijke publicatie vindt u hier.
Foto: Grainger College of Engineering, University of Illinois, Urbana-Champaign