
14/03/2023
Door Ad Spijkers
Robotonderdelen kunnen worden geassembleerd tot behendige robots voor het verkennen van lavabuizen of zware draagrobots voor transporter van zonnepanelen.
Wanneer astronauten een permanente basis op de maan beginnen te bouwen, zoals NASA de komende jaren van plan is te doen, hebben ze hulp nodig. Robots zouden mogelijk het zware werk kunnen doen door kabels te leggen, zonnepanelen te plaatsen, communicatietorens op te richten en leefgebieden te bouwen. Maar als elke robot is ontworpen voor een specifieke actie of taak, kan een maanbasis worden overspoeld door een scala aan machines met zijn hun unieke onderdelen en protocollen.
Wormbots
Om een wildgroei aan robots te voorkomen, ontwerpt een team van ingenieurs van het Massachusetts Institue of Technology (MIT) een kit met universele robotonderdelen. Een astronaut kan die mixen en matchen om snel verschillende robotsoorten te configureren voor verschillende missies op de maan. Zodra een missie is voltooid, kan een robot worden gedemonteerd en kunnen de onderdelen ervan worden gebruikt om een nieuwe robot te configureren voor een andere taak.
Het team noemt het systeem WORMS, Walking Oligomeric Robotic Mobility System. De onderdelen van het systeem omvatten op wormen geïnspireerde robotledematen die een astronaut gemakkelijk op een basis kan klikken en die samenwerken als een lopende robot. Afhankelijk van de missie kunnen onderdelen worden geconfigureerd om bijvoorbeeld grote robots te bouwen die zware zonnepanelen een heuvel op kunnen dragen. Dezelfde onderdelen kunnen opnieuw worden geconfigureerd tot zespotige spinrobots die in een lavabuis kunnen worden neergelaten om naar bevroren water te boren.
U kunt zich een schuurtje op de kunnen voorstellen met planken vol wormonderdelen met motoren, sensoren, computers en batterijen. Astronauten kunnen de schuur binnengaan, de wormen kiezen die ze nodig hebben, samen met de juiste schoenen, lichaam, sensoren en gereedschappen. Ze kunnen deze ter plekke in elkaar klikken en uit elkaar halen. Het ontwerp is flexibel, duurzaam en kostenbesparend.
Ontwerp
WORMS is in 2022 bedacht als antwoord op NASA's Breakthrough, Innovative and Game-changing (BIG) Idea Challenge. Dit is een jaarlijkse wedstrijd voor universiteitsstudenten om een baanbrekend idee te ontwerpen, ontwikkelen en demonstreren. In 2022 daagde de Amerikaanse ruimtevaartorganisatie studenten uit om robotsystemen te ontwikkelen die zich over extreem terrein kunnen verplaatsen, zonder het gebruik van wielen.
Een team van van de Space Resources Workshop van MIT ging de uitdaging aan. Deze was specifiek gericht op een maanrobotontwerp dat door het extreme terrein van de zuidpool van de maan zou kunnen navigeren. Dit landschap wordt gekenmerkt door dik, pluizig stof; steile, rotsachtige hellingen en diepe lavabuizen. De omgeving herbergt ook permanent in de schaduw liggende gebieden die bevroren water kunnen bevatten dat, indien toegankelijk, essentieel zou zijn voor het overleven van astronauten.
Dierlijke instincten
Terwijl ze nadachten over manieren om door het polaire terrein van de maan te navigeren, lieten de studenten zich inspireren door dieren. Bepaalde dieren zouden conceptueel geschikt kunnen zijn voor bepaalde missies. Een spin kan naar beneden vallen en een lavabuis verkennen, een rij olifanten kan zwaar materieel dragen terwijl ze elkaar een steile helling af ondersteunen. Een geit, vastgebonden naar een os, zou kunnen helpen het grotere dier de helling van een heuvel op te leiden terwijl het een reeks zonnepanelen vervoert.
Terwijl ze aan deze diereninspiraties dachten, realiseerden ze zich dat een van de eenvoudigste dieren, de worm, vergelijkbare bewegingen maakt als een arm, een been, een ruggengraat of een staart. Maar toen ging het lampje branden: ze konden al deze op dieren geïnspireerde robots bouwen met behulp van wormachtige aanhangsels.
Snap on, snap off
Het idee was om met slechts een paar onderdelen, op verschillende manieren gecombineerd, al deze verschillende robots te mixen en matchen. De belangrijkste onderdelen van het systeem zijn de worm en een carrosserie of chassis. De worm kan worden bevestigd via een universeel interfaceblok dat de twee delen aan elkaar klikt door middel van een draai-en-vergrendelingsmechanisme. De onderdelen kunnen worden losgekoppeld met een klein stuk gereedschap dat de veerbelaste pinnen van het blok losmaakt.
De wormen en lichamen kunnen ook in accessoires worden geklikt, zoals een 'schoen', die het team heeft ontworpen in de vorm van een wok. Hetzelfde geldt voor een Lidar -systeem dat de omgeving in kaart kan brengen om een robot te helpen navigeren. In toekomstige iteraties hopen ze meer opklikbare sensoren en gereedschappen toe te voegen, zoals lieren, balanssensoren en boren.
Hardware en software
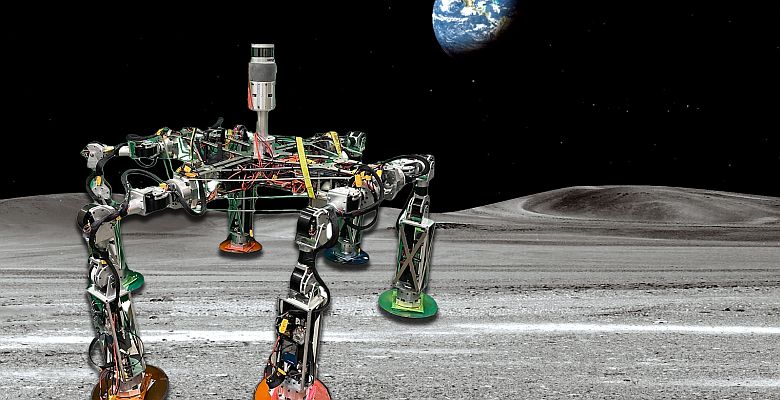
Het team ontwikkelde software die kan worden aangepast om meerdere appendages te coördineren. Als proof of concept bouwde het team een zespotige robot ter grootte van een skelter. In het lab toonden ze aan dat, eenmaal gemonteerd, de onafhankelijke ledematen van de robot samenwerkten om over een vlakke ondergrond te lopen. Het team liet ook zien dat ze de robot snel konden monteren en demonteren in het veld, op een woestijnterrein in Californië.
In de eerste generatie heeft elke worm een lengte van ongeveer 1 m en een massa van ongeveer 9 kg. In de zwaartekracht van de maan, die ongeveer een zesde is van die van de aarde, zou elke ledemaat ongeveer 1,4 pond wegen. Een astronaut moet dit gemakkelijk kunnen hanteren om een robot in het veld te bouwen of te demonteren. Het team heeft de specificaties gepland voor een grotere generatie met langere en iets zwaardere aanhangsels. Deze grotere onderdelen kunnen aan elkaar worden geklikt om robots te bouwen die zware ladingen kunnen vervoeren.
Foto: de onderzoekers, bewerkt door MIT News