
09/07/2021
Door Ad Spijkers
Duitse en Canadses onderzoekers willen orderpickrobots intelligenter maken met gedistribueerde AI methoden.
Wetenschappers uit Duitsland en Canada onderzoeken hoe trainingsgegevens uit meerdere orderpickstations, van meerdere fabrieken of zelfs van meerdere bedrijven kunnen worden gebruikt zonder dat die gevoelige bedrijfsgegevens hoeven vrij te geven. Ze willen weten hoe met behulp van algoritmen uit kunstmatige intelligentie (AI) robuustere en efficiëntere oplossingen kunnen worden ontwikkeld dan met data van slechts één robot.
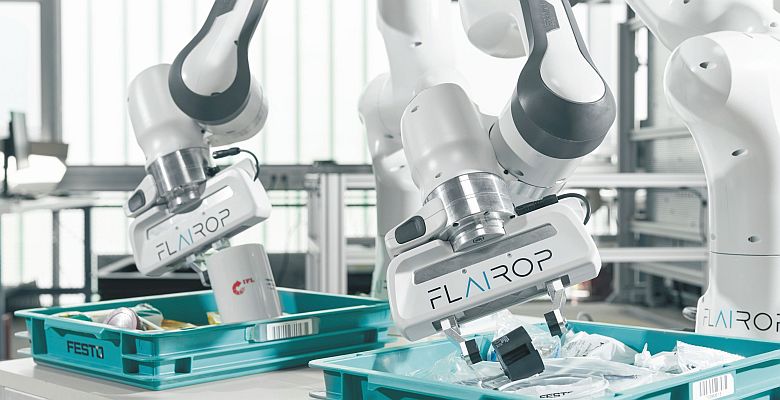
Op veel orderpickstations worden artikelen door middel van grijpen en overzetten verwerkt door autonome robots. De robots worden daartoe met heel verschillende items getraind. Aan het eind van de dag zouden ze via de nieuwe methode toegang moeten hebben tot artikelen van andere stations die ze nog niet hebben leren kennen. Met deze aanpak van gedistribueerd leren (Federated Learning) werken de onderzoekers aan een balans tussen datadiversiteit en databeveiliging.
Krachtige algoritmen
Tot nu toe werd Federated Learning vooral gebruikt in de medische sector voor beeldanalyse, waar de bescherming van patiëntgegevens bijzonder belangrijk is. Alleen delen van de opgeslagen kennis worden naar een centrale server verzonden. Daar worden de gewichten van alle stations verzameld en geoptimaliseerd met behulp van verschillende criteria. De verbeterde versie wordt vervolgens teruggebracht naar de lokale stations en het proces wordt herhaald.
Het doel is om nieuwe, krachtigere algoritmen te ontwikkelen voor het robuuste gebruik van kunstmatige intelligentie voor Industrie 4.0 en Logistiek 4.0, met inachtneming van de richtlijnen voor gegevensbescherming.
Tijdens het project zullen in totaal vier autonome pickstations worden opgezet voor het trainen van de robots: twee bij het Karlsruher Institut für Technologie (KIT) en twee bij Festo in Esslingen am Neckar. Andere partners zijn AI-specialist Darwin AI en de University of Waterloo, beide in Waterloo (Ontario).
Flairop
In het Flairop onderzoeksproject ontwikkelen wetenschappers nieuwe manieren waarop robots van elkaar kunnen leren zonder gevoelige data en bedrijfsgeheimen te delen. Dat heeft twee grote voordelen: het beschermen van de de data van klanten en snelheidswinst doordat de robots taken sneller kunnen overnemen. Cobots kunnen bijvoorbeeld productiemedewerkers ondersteunen bij repetitieve, moeilijke en vermoeiende taken. Flairop (Federated Learning for Robot Picking) is een samenwerking tussen Canadese en Duitse organisaties en wordt gefinancierd door de regeringen van beide landen.
KIT houdt zich als leider van het consortium bezig met de ontwikkeling van het automatisch genereren van leergegevens en van het Federated Learning Framework. Festo brengt kennis van de ontwikkeling van pickstations en in voert een pilot in echte magazijnlogistiek uit. DarwinAI stelt zijn Explainable (XAI)-platform beschikbaar voor het project. Het bedrijf hoopt dat zijn technologie hoogwaardige 'human-in-the-loop' processen mogelijk zal maken.
De University of Waterloo wil in het project de volgende generatie betrouwbare kunstmatige intelligentie realiseren. Door gebruik te maken van XAI en Federated Learning kan de universiteit AI-oplossingen creëren die fabrieksarbeiders ondersteunen bij hun dagelijkse productietaken om de efficiëntie, productiviteit en veiligheid te verhogen.
Foto: Amadeus Bramsiepe, KIT