
22/09/2023
Door Ad Spijkers
Met nieuwe technologie zijn specifieke plekken met hoge nauwkeurigheid te bereiken.
Longkanker is de belangrijkste oorzaak van aan kanker gerelateerde sterfgevallen in de Verenigde Staten. Sommige tumoren zijn extreem klein en verbergen zich diep in het longweefsel, waardoor het voor chirurgen moeilijk is om ze te bereiken. Om deze uitdaging aan te gaan, hebben onderzoekers van de University of North Carolina in Chapel Hill en Vanderbilt University in Nashville gewerkt aan een buigzame maar stevige robot die longweefsel kan doorkruisen.
Opbouw
De robot bestaat uit verschillende afzonderlijke componenten. Een mechanische bediening zorgt voor gecontroleerde stuwkracht van de naald om vooruit en achteruit te gaan. Het naaldontwerp maakt het mogelijk om langs gebogen paden te sturen. De naald is gemaakt van een nikkel-titanium-legering en is met een laser geëtst om de flexibiliteit te vergroten, waardoor hij gemakkelijk door weefsel kan bewegen.
Terwijl hij vooruit beweegt, zorgt de ets op de naald ervoor dat hij gemakkelijk om obstakels heen kan sturen. Andere hulpstukken, zoals katheters, kunnen samen met de naald worden gebruikt om procedures zoals longbiopten uit te voeren. Om door weefsel te kunnen prikken, moet de naald weten waar hij heen gaat.
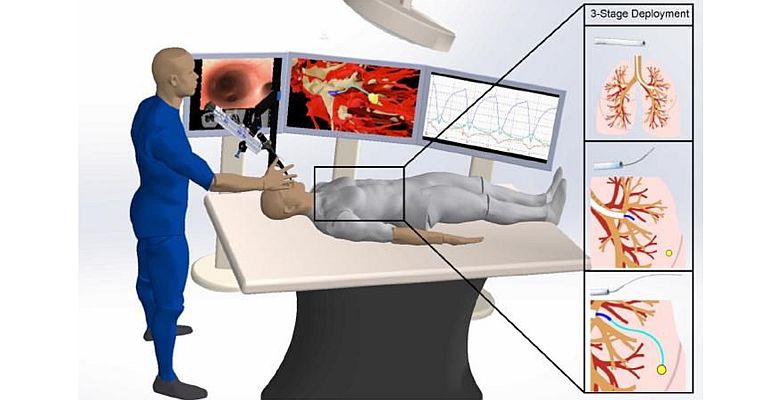
Het onderzoeksteam gebruikte CT-scans van de borstholte van de proefpersoon en kunstmatige intelligentie om driedimensionale modellen van de long te creëren, inclusief de luchtwegen, bloedvaten en het gekozen doelwit. Met behulp van dit 3D-model en zodra de naald is gepositioneerd voor lancering, instrueert hun door AI gestuurde software hun route. Ze kunnen autonoom van 'punt A' naar 'punt B' reizen, waarbij belangrijke structuren zoals kleine luchtwegen en bloedvaten worden vermeden. Door deze technologie kunnen ze doelen bereiken waar ze niet zouden kunnen komen met een standaard of zelfs robotbronchoscoop.
Werking
De autonome bestuurbare naald is compact, maar het hele systeem zit boordevol technologieën waarmee de naald real-time autonoom kan navigeren. De naald navigeert door longweefsel en vermijdt obstakels zoals grote bloedvaten terwijl hij naar zijn bestemming gaat. De naald kan ook ademhalingsbewegingen registreren. In tegenstelling tot andere organen breiden de longen zich voortdurend uit en trekken ze samen in de borstholte. Dit kan bij een levend, ademend onderwerp het richten moeilijk maken.
De onderzoekers testten hun robot terwijl het laboratoriummodel de adem intermitterend inhield. Elke keer dat de adem van de proefpersoon wordt ingehouden, wordt de robot geprogrammeerd om vooruit te gaan.
Voortgang
Er zijn voor de robot nog enkele hobbels te nemen om doelen te bepalen en ze vervolgens effectief te bereiken. Er is nog veel werk aan de winkel. Maar de onderzoekers willen de grenzen blijven verleggen van wat ze kunnen doen voor patiënten. Ze willen doorgaan met het creëren van nieuwe autonome medische robots die de sterke punten van robotica en AI combineren. Ze willen hiermee de medische resultaten verbeteren voor patiënten die met verschillende gezondheidsuitdagingen worden geconfronteerd. Tegelijkertijd willen ze garanties bieden op het gebied van patiëntveiligheid.
De wetenschappelijke publicatie vindt u hier.
Ill.: Kuntz et al.