
26/04/2023
Door Ad Spijkers
De oceaansoep is een van de ergste verontreinigingen op aarde. Maar weer is het de dierenwereld die een mogelijke oplossing aanreikt.
Robotici van het Max Planck Institut für Intelligente Systeme (MPI-IS) in Stuttgart hebben een op kwallen geïnspireerde onderwaterrobot ontwikkeld die ze ooit hopen te gebruiken om afval van de oceaanbodem te verzamelen. Het bijna geruisloze prototype kan objecten onder zijn lichaam vastleggen zonder het aan te raken en beweegt zich storingsvrij in gevoelige omgevingen zoals koraalriffen. Zwermen van deze robots zouden op een dag kunnen helpen bij het opruimen van de oceanen van de wereld.
Jelly-Bot
Onderwaterrobots zijn vaak omvangrijk met starre lichamen die geen complexe omgevingen kunnen verkennen of monsters nemen. Daarnaast zijn ze relatief luidruchtig door elektromotoren of hydraulische pompen. In hun zoektocht naar een geschikter ontwerp lieten wetenschappers in Stuttgart zich inspireren door de natuur. Ze ontwikkelden een kwalachtige, veelzijdige, energetisch zuinige en bijna stille robot ter grootte van een hand, de Jellyfish-Bot.
Om de robot te bouwen, gebruikte het team elektrohydraulische actuatoren. Deze dienen als kunstmatige spieren die de robot aandrijven. Rondom deze spieren bevinden zich luchtkussens, zachte en stijve componenten die de robot stabiliseren en waterdicht maken. Op deze manier komt de hoogspanning die door de actuatoren stroomt niet in contact met het omringende water. Met regelmatige tussenpozen loopt er stroom door dunne draden, waardoor spieren samentrekken en uitzetten. Hierdoor kan de robot gracieus zwemmen en draaikolken onder zijn lichaam creëren.
Werking
Wanneer een kwal naar boven zwemt, kan hij objecten op zijn pad vangen omdat hij stromingen rond zijn lichaam creëert. Zo verzamelt hij ook voedingsstoffen. De robot van het MPI-IS laat het water er ook omheen circuleren. Deze functie is handig voor het verzamelen van voorwerpen zoals puindeeltjes. Hij kan het afval vervolgens naar de oppervlakte slepen waar de deeltjes later worden gerecycled. Hij kan ook monsters nemen, zoals viseieren. De machine heeft geen negatieve impact op het milieu of zeedieren en is bijna geruisloos.
Naar schatting zinkt 70% van het afval naar de zeebodem. Meer dan 60% van dit afval bestaat uit kunststof dat honderden jaren nodig heeft om te ontbinden. Het was daarom belangrijk voor de onderzoekers om een robot te ontwikkelen die objecten zoals afval kan verplaatsen en naar boven kan transporteren. Ze hopen dat onderwaterrobots op een dag kunnen helpen de oceanen schoon te maken.
De Jellyfish-Bot kan objecten verplaatsen en vangen zonder contact, alleen of in een zwerm. De robot werkt sneller dan andere systemen en haalt een snelheid tot 6,1 cm/s. Bovendien heeft Jellyfish-Bot slechts een laag vermogen nodig (ongeveer 100 mW). Hij is veilig voor mens en vis als het polymeer dat de robot isoleert uiteindelijk scheurt. Tegelijkertijd zijn de geluiden van de robot niet te onderscheiden van het achtergrondgeluid. Op deze manier gaat Jellyfish-Bot zachtjes om met zijn omgeving zonder deze te storen – net als zijn biologische tegenhanger.
Opbouw
De robot bestaat uit verschillende lagen. Sommige stabiliseren de robot, andere maken hem drijvend of sluiten hem af. Een andere polymeerlaag fungeert als een web. In het midden van de verschillende lagen zijn elektrisch bediende kunstspieren (Hasel's), kunststof zakken gevuld met plantaardige olie die gedeeltelijk bedekt zijn met elektroden.
Door een hoge spanning op een elektrode aan te brengen, wordt de spier positief geladen terwijl het omliggende water negatief wordt geladen. Dit creëert een kracht tussen de positief geladen elektrode en het negatief geladen water, die de olie heen en weer duwt in de zak, waardoor de zakken samentrekken en ontspannen – net als een echte spier. Hasel's zijn bestand tegen hoge elektrische spanningen die worden gegenereerd door de geladen elektroden en worden beschermd tegen water door een isolerende laag. Dit is belangrijk omdat dit type spieren nooit eerder is gebruikt om een onderwaterrobot te bouwen.
Ontwikkeling
De onderzoekers ontwikkelden eerst een Jellyfish-Bot met een elektrode en zes vingers, of armen. In de tweede stap verdeelde het team de enkele elektrode in afzonderlijke groepen om ze onafhankelijk van elkaar te bedienen. Ze konden objecten grijpen door vier van de armen te gebruiken om te zwemmen en de andere twee om te grijpen. Of ze bedienden slechts een subset van de armen om de robot in verschillende richtingen te sturen.
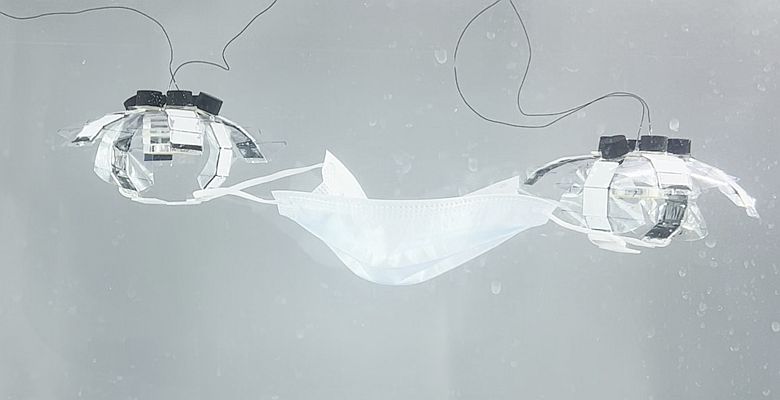
Ook hebben de onderzoekers gekeken hoe ze een groep van meerdere robots kunnen aansturen. Ze hebben bijvoorbeeld twee robots een corona-beschermend masker laten oppakken, wat moeilijk is voor een enkele robot. Twee robots kunnen ook samenwerken om zware lasten te dragen.
Status
Momenteel heeft de Jellyfish-bot nog een kabel nodig, een nadeel als mensen het ooit echt in de oceaan willen gebruiken. Het doel is om draadloze robots te ontwikkelen, waarvoor de eerste stap is gezet. De onderzoekers hebben alle functionele modules zoals de batterij en draadloze besturingseenheden ingebouwd om draadloze manipulatie in de toekomst mogelijk te maken. Ze bevestigden een besturingseenheid aan de bovenkant van de robot en een batterij en microcontroller aan de onderkant.
De Jellyfish-Bot heeft al gezwommen in de vijver van de Max Planck Campus Stuttgart. De onderzoekers wisten de robot met succes rechtdoor te sturen. Tot nu toe zijn ze er echter niet in geslaagd om de draadloze robot van koers te laten veranderen en een andere kant op te laten zwemmen.Maar naar verwachting zal het niet lang zal duren voor ze dat bereiken.
De wetenschappelijke publicatie vindt u hier.
Foto: Max Planck Institut für Intelligente Systeme