
24/05/2023
Door Ad Spijkers
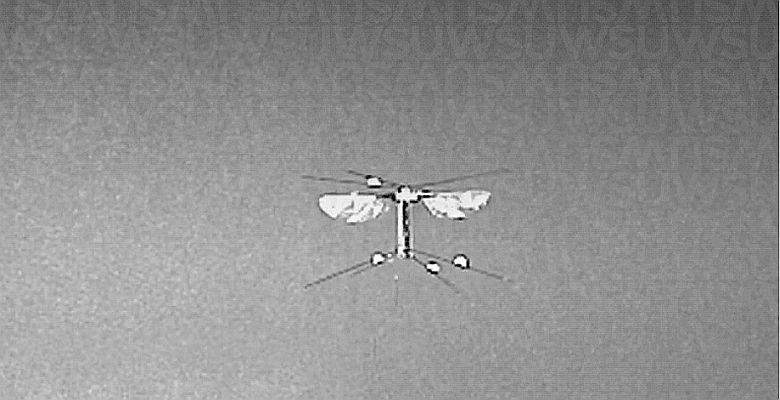
Met vier vleugels uit koolstofvezel en PET-folie en vier lichtgewicht actuatoren om elke vleugel te bedienen, vliegt het Bee++ prototype stabiel in alle richtingen.
Onderzoekers van Washington State University (WSU) in Pullman (460 km oostelijk van Seattle) hebben een robotbij ontwikkeld die volledig in alle richtingen kan vliegen. Het prototype heeft vier vleugels gemaakt van koolstofvezel en Mylar (PET-folie) en vier lichtgewicht actuatoren om elke vleugel te bedienen. Het is volgend de onderzoekers het eerste prototype dat stabiel in alle richtingen vliegt. Dat omvat de lastige draaiende beweging die bekend staat als gieren, waarbij de Bee ++ volledig de zes graden vrije beweging bereikt die een vliegend insect vertoont.
Kunstmatige bij
Onderzoekers proberen al meer dan dertig jaar om kunstmatige vliegende insecten te ontwikkelen. Deze zouden op een dag voor veel toepassingen kunnen worden gebruikt, zoals kunstmatige bestuiving, zoek- en reddingspogingen in krappe ruimtes, biologisch onderzoek of miliebewaking, ook in vijandige omgevingen. Maar alleen al om de kleine robots te laten opstijgen en landen, was de ontwikkeling van controllers nodig die zich gedragen zoals het brein van een insect.
Het is een mix van robotontwerp en besturing, aldus de onderzoekers. Controle is zeer wiskundig en het ontwerp is een soort kunstmatig brein. Sommige mensen noemen het de verborgen technologie, maar zonder die simpele hersens zou niets werken.
De onderzoekers ontwikkelden aanvankelijk een tweevleugelige robotbij, maar deze was beperkt in zijn beweging. In 2019 bouwden ze voor het eerst een robot met vier vleugels die licht genoeg was om op te stijgen. Om twee manoeuvres uit te voeren die bekend staan als stampen of rollen, laten de onderzoekers de voorvleugels op een andere manier klappen dan de achtervleugels om te stampen en de rechtervleugels op een andere manier klappen dan de linkervleugels om te rollen. Hierdoor ontstaat een koppel dat de robot ronddraait rond de twee belangrijkste horizontale assen.
Gieren
Maar het beheersen van de complexe gierbeweging is erg belangrijk. Zonder dat draaien robots vanuit stilstand en kunnen ze zich niet op een punt concentreren. Het resultaat is dat ze crashen. Als het gieren niet kan worden beheerst, is de toepassing erg beperkt. Als je een bij een bloem nadert maar zijn gier niet kan beheersen, draait hij de hele tijd terwijl hij probeert er te komen.
Alle bewegingsgraden beheersen is ook van cruciaal belang voor ontwijkende manoeuvres of het volgen van objecten. Het systeem is onstabiel en het probleem is erg moeilijk. Jarenlang hadden mensen theoretische ideeën over hoe ze her gieren konden beheersen, maar niemand kon het bereiken vanwege bedieningsbeperkingen.
Om hun robot op een gecontroleerde manier te laten draaien, keken de onderzoekers van WSU goed naar insecten en bewogen de vleugels zodanig dat ze in een schuin vlak klapperen. Ze verhoogden ook het aantal keren per seconde dat hun robot met zijn vleugels kan klapperen - van 100 tot 160 keer per seconde. Een deel van de oplossing was het fysieke ontwerp van de robot. De onderzoekers bedachten ook een nieuw ontwerp voor de controller.
Met een massa van 95 mg en een spanwijdte van 33 mm is de Bee++ nog steeds groter dan echte bijen, die ongeveer 10 mg wegen. In tegenstelling tot echte insecten kan de robotbij maar ongeveer vijf minuten per keer autonoom vliegen, dus is hij meestal via een kabel aan een stroombron vastgemaakt. De onderzoekers werken ook aan de ontwikkeling van andere soorten insectenrobots, waaronder rupsen en schaatsenrijders. Overigens heeft WSU ook veel expertise over de echte bijen en werkt de universiteit hard aan methoden om het voortbestaan van bijenpopulaties wereldwijd te garanderen.
De wetenschappelijke publicatie vindt u hier.
Foto: Washington State University