
31/07/2023
Door Ad Spijkers
Een internationaal team onderzoekers heeft een aanraaksensor ontwikkeld om de tactiele mogelijkheden van robots te verbeteren.
De menselijke hand kan druk, temperatuur, textuur en pijn voelen. Bovendien kan de menselijke hand onderscheid maken tussen objecten op basis van hun vorm, grootte, gewicht en andere fysieke eigenschappen. Veel huidige robothanden of grijpers komen niet in de buurt van menselijke handen. Ze hebben geen geïntegreerde haptische mogelijkheden, wat het hanteren van objecten bemoeilijkt. Zonder kennis over de interactiekrachten en de vorm van het gehanteerde object, zouden de robotvingers geen 'gevoel van aanraking' hebben en zouden objecten gemakkelijk uit de vingers van de robothand kunnen glippen of zelfs verpletterd kunnen worden als ze breekbaar zijn.
Vingertopsensor
Het bereiken van behendigheid op menselijk niveau tijdens manipulatie en grijpen is een al lang bestaand doel in de robotica. Om dit te bereiken, is een betrouwbaar gevoel voor tactiele informatie en kracht essentieel voor robots. Een recente studie beschrijft de L3 F-Touch sensor die de krachtwaarnemingsmogelijkheden van klassieke tactiele sensoren verbetert. De sensor is licht, goedkoop en draadloos, waardoor het een betaalbare optie is om achteraf op bestaande robothanden en grijpers aan te brengen.
Met de nieuwe sensor kunnen robots objecten 'voelen' en de grip dienovereenkomstig kan aanpassen. De L3 F-Touch vingertopsensor heeft een hoge resolutie. De sensor kan de geometrie van een object meten en de krachten bepalen om ermee te interageren. De ontwikkelaars zijn verbonden aan de Queen Mary University in Londen, Mitsubishi Electric Research Labs in Cambridge (Massachusetts) en een aantal onderzoeksinstituten in Beijing.
Werking
Bestaande sensoren schatten interactiekrachten door reconstructie van camerabeelden van de vervorming van een zacht elastomeer. De L-3 F-Touch daarentegen meet interactiekrachten rechtstreeks via een geïntegreerde mechanische ophangstructuur met een spiegelsysteem dat een hogere meetnauwkeurigheid en groter meetbereik. De sensor is ontworpen om krachtmetingen los te koppelen van geometrie-informatie. Daarom is de waargenomen drieassige kracht immuun voor contactgeometrie in vergelijking met bestaande sensoren. Door de ingebouwde draadloze communicatie is de sensor ook beter te integreren in robothanden.
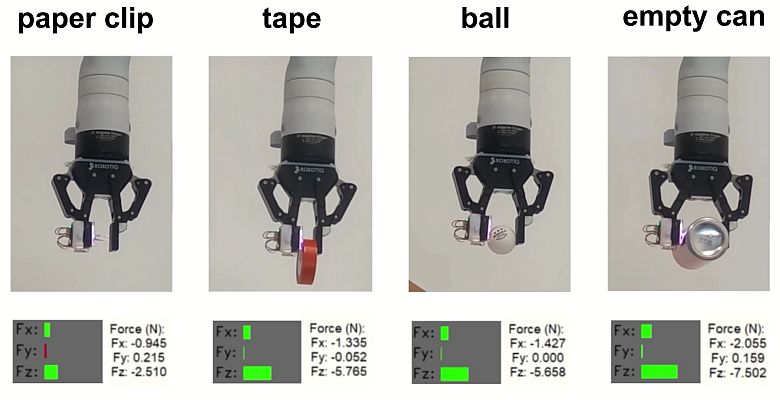
Wanneer de sensor het oppervlak raakt, zorgt een compacte ophangconstructie ervoor dat het elastomeer bij contact wordt verplaatst. Deze verplaatsing van het elastomeer wordt gevolgd door de beweging van een speciale markering, een zogenaamde ARTag, te detecteren. Hierdoor zijn de contactkrachten langs de drie hoofdassen (x, y en z) te meten via een kalibratieproces.
Verdere ontwikkeling
De onderzoekers zullen hun toekomstige werk concentreren op het uitbreiden van de mogelijkheden van de sensor. Ze willen niet alleen kracht langs de drie hoofdassen meten, maar ook rotatiekrachten zoals draaiing, die kunnen worden ervaren tijdens het vastdraaien van schroeven. Tegelijkertijd moet de sensor nauwkeurig en compact blijven. Deze vooruitgang kan het tastgevoel mogelijk maken voor meer dynamische en behendige robots bij manipulatietaken. Dat geldt zelfs in mens-robot interactie-omgevingen, zoals voor revalidatie van patiënten of fysieke ondersteuning van ouderen.
Dit kan de weg vrijmaken voor meer geavanceerde en betrouwbare robotica in de toekomst. Met de L3 F-Touch-sensor kunnen robots een tastzin hebben, waardoor ze objecten beter kunnen hanteren en complexe manipulatietaken kunnen uitvoeren.
De wetenschappelijke publicatie vindt u hier.
Foto: F-Touch Team