
29/01/2024
Door Ad Spijkers
Engelse onderzoekers hebben een robot getraind om braille te lezen met tweemaal de snelheid van mensen.
Onderzoekers aan de University of Cambridge hebben een robotsensor ontwikkeld die kunstmatige intelligentietechnieken gebruikt om braille te lezen met snelheden die ongeveer het dubbele zijn van die van de meeste menselijke lezers. Ze gebruikten machine learning algoritmen om een robotsensor te leren snel over regels brailletekst te glijden. De robot kon braille lezen met een snelheid van 315 woorden per minuut en een nauwkeurigheid van bijna 90%.
De robot-braillelezer is niet ontwikkeld als ondersteunende technologie. Maar de onderzoekers stellen dat de hoge gevoeligheid die nodig is om braille te lezen het een goede test maakt in de ontwikkeling van robothanden of protheses met een vergelijkbare gevoeligheid voor menselijke vingertoppen.
Gevoeligheid
Menselijke vingertoppen zijn erg gevoelig en helpen ons informatie te verzamelen over de wereld om ons heen. Onze vingertoppen kunnen kleine veranderingen in de textuur van een materiaal detecteren. Ook kunnen ze ons helpen te bepalen hoeveel kracht we moeten gebruiken bij het vastpakken van een voorwerp. We kunnen bijvoorbeeld een ei oppakken zonder het te breken of een bowlingbal zonder deze te laten vallen.
Het reproduceren van dat gevoeligheidsniveau in een robothand, op een energiezuinige manier, is een grote technische uitdaging. In Cambridge ontwikkelen onderzoekers oplossingen voor deze en andere vaardigheden die mensen gemakkelijk vinden, maar robots moeilijk. De zachtheid van menselijke vingertoppen is een van de redenen waarom we voorwerpen met de juiste druk kunnen vastpakken. Voor robotica is zachtheid een nuttige eigenschap, maar er is veel sensorinformatie nodig. Het is lastig om beide tegelijk te hebben, vooral als het om flexibele of vervormbare oppervlakken gaat.
Brailletest
Braille is een ideale test voor de 'vingertop' van een robot. Het lezen van brailleschrift vereist een hoge gevoeligheid omdat de punten in elk representatief letterpatroon dicht bij elkaar liggen. De onderzoekers gebruikten een kant-en-klare sensor om een robotachtige braillelezer te ontwikkelen die het menselijke leesgedrag nauwkeuriger nabootst.
Er bestaan al robotachtige braillelezers, maar die lezen slechts één letter tegelijk. Maar mensen lezen niet letter voor letter. Bestaande robotachtige braillelezers werken op een statische manier. Ze raken een letterpatroon aan, lezen het, trekken zich omhoog van het oppervlak, gaan er overheen, gaan naar het volgende letterpatroon, enzovoort. De onderzoekers willen iets dat realistischer en veel efficiënter is.
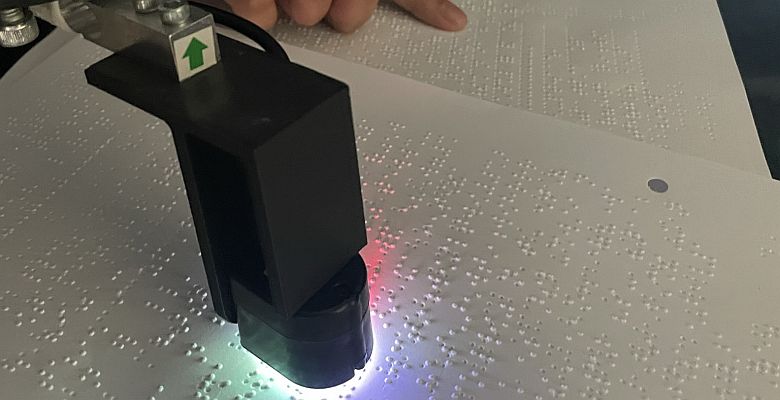
De robotsensor die de onderzoekers gebruikten, heeft een camera in zijn 'vingertop' en leest met behulp van een combinatie van de informatie van de camera en de sensoren. Dat is moeilijk voor robotici, omdat veel beeldverwerking nodig is om bewegingsonscherpte te verwijderen, wat tijd en energie kost.
Het team ontwikkelde machine learning algoritmen, zodat de robotlezer de beelden kon 'vervagen' voordat de sensor de letters probeerde te herkennen. Ze trainden het algoritme op een reeks scherpe braille-afbeeldingen met nepvervaging. Nadat het algoritme had geleerd de letters onscherp te maken, gebruikten de onderzoekers een computer vision model om elk teken te detecteren en te classificeren.
Snel en nauwkeurig
Nadat de algoritmen waren verwerkt, testten de onderzoekers hun lezer door deze snel langs rijen brailletekens te laten glijden. De robotachtige braillelezer kan 315 woorden per minuut lezen met een nauwkeurigheid van 87%. Dat is twee keer zo snel en ongeveer net zo nauwkeurig als een menselijke braillelezer.
Omdat de onderzoekers gebruik maakten van nepvervaging was het lezen van braille verrassend nauwkeurig. De onderzoekers hebben een afweging gevonden tussen snelheid en nauwkeurigheid, wat ook het geval is bij menselijke lezers.
De leessnelheid van braille is een goede manier om de dynamische prestaties van tactiele detectiesystemen te meten. De bevindingen kunnen ook buiten braille toepasbaar zijn, voor toepassingen zoals het detecteren van oppervlaktetexturen of slippen bij robotmanipulatie. In de toekomst hopen de onderzoekers de technologie op te schalen naar de grootte van een mensachtige hand of huid.
De wetenschappelijke publicatie vindt u hier.
Foto: University of Cambridge